Training Neural Networks
约 1917 个字 45 行代码 13 张图片 预计阅读时间 11 分钟
训练神经网络不只是选择一个模型结构,还包括初始化、激活函数、数据预处理、正则化、学习率调度和迁移学习等一整套流程.
1. One time setup
1.1 Activation Functions
激活函数图像
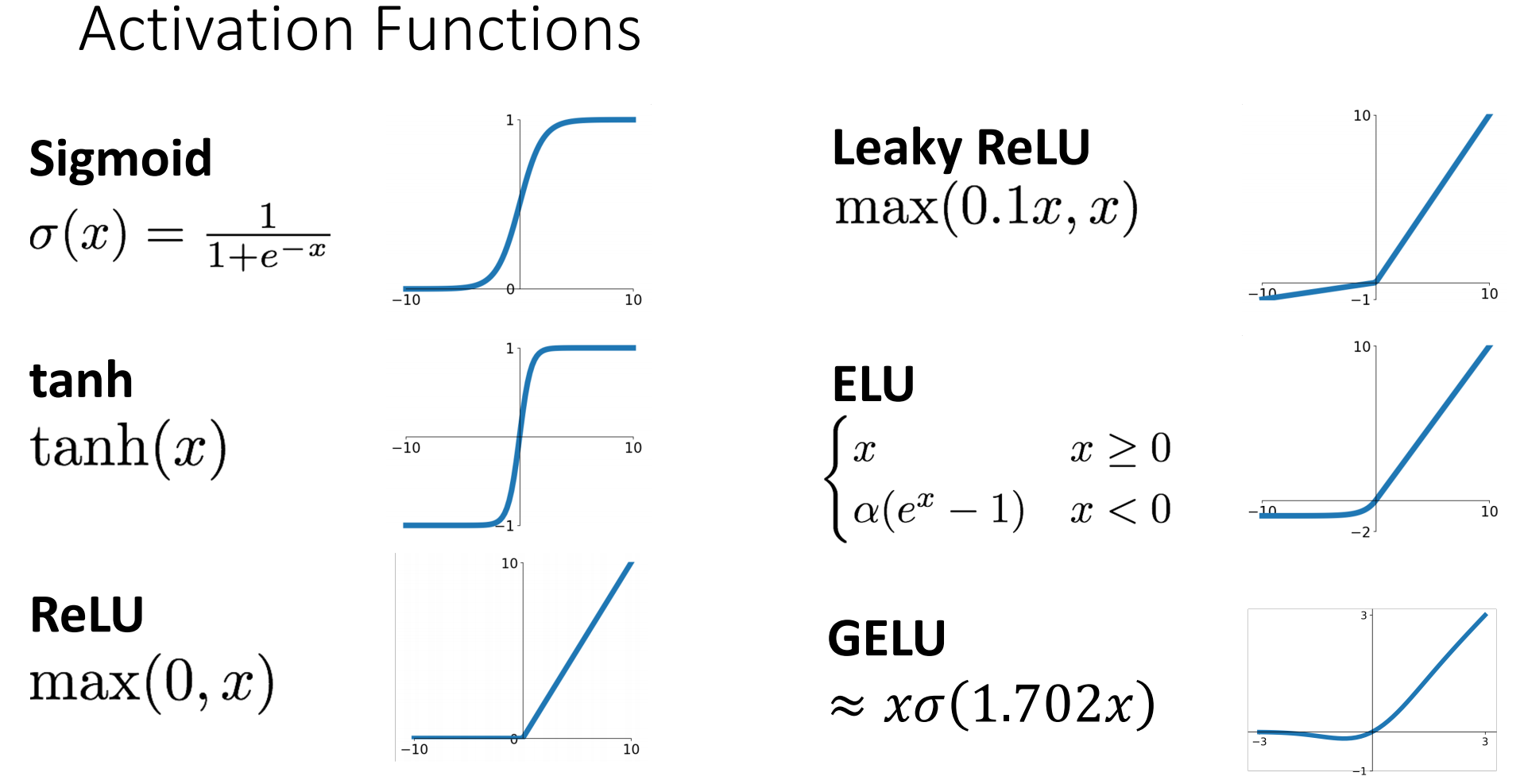
Sigmoid \(\sigma(x)=\dfrac{1}{1+e^{-x}}\):
- 当 \(|x|\) 过大时梯度消失(主要)
- 输出永远是正的,导致下一层权重梯度方向受限
- 计算exp比较贵
tanh:
- 以0为中心,解决了输出永远为正的问题
- 但 \(|x|\) 过大时梯度仍然消失
ReLU \(f(x)=\max(0,x)\):
- 在正半轴梯度不会消失
- 计算十分简单
- 在实践中,收敛比 sigmoid/tanh 快很多
- 负半轴梯度为0,如果所有数据都落在负半轴,输出和梯度永远是0,称 dead ReLU.
Leakly ReLU \(f(x)=\max(\alpha x, x)\):不会出现 dead ReLU 问题
ELU:计算exp比较贵
SELU:倍增版本的ELU,参数取值很逆天
GELU \(f(x)=x\sigma(1.702x)\):在 Transformer 中常用
总结
- 不要使用 Sigmoid 或 tanh.
- 一般来讲使用 ReLU 即可.
- 如果想要 0.1% 数量级的提升,可以试试 Leakly ReLU / ELU / SELU / GELU.
1.2 Data Preprocessing
将原始数据进行归一化处理.可以用如下方法:
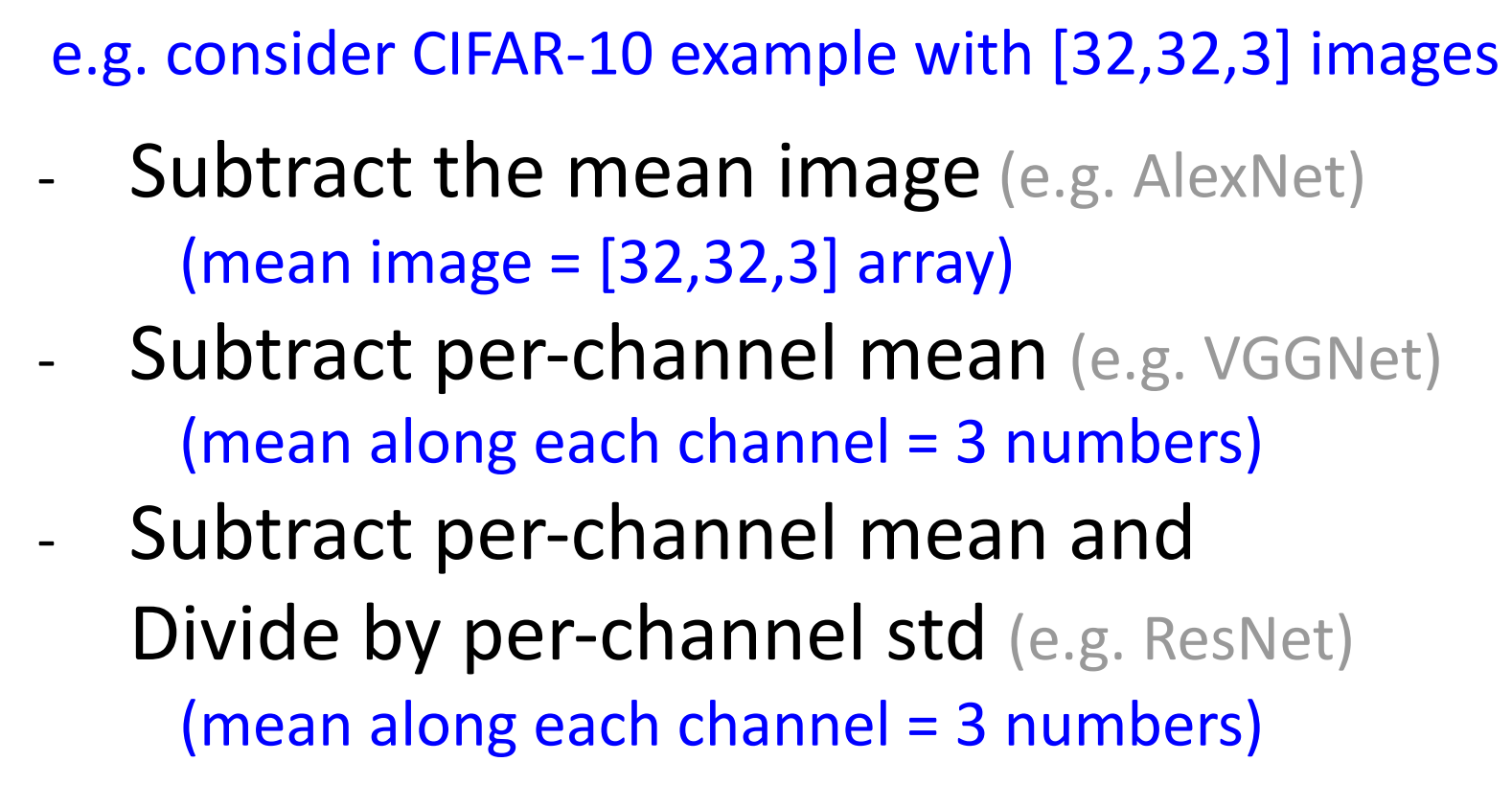
也可以对数据进行PCA(让不同维度解耦,协方差矩阵变为对角阵)、 Whitening(把每个方向上方差缩放为1,协方差矩阵变为单位阵),不过这两个在图像任务中不常见.
1.3 Weight Initialization
将权重做特定的初始化,使得输入与输出的方差不变.
Xavier Initialization:
-
正态分布版本:\(W_{ij}\sim \mathcal{N}\left(0,\dfrac{2}{D_\text{in}+D_\text{out}}\right)\).对于卷积,\(D_{\text{in}}=K^2\times C_{\text{in}}\).
-
均匀分布版本:\(W_{ij}\sim U\left(-\sqrt{\dfrac{6}{D_\text{in}+D_\text{out}}},\sqrt{\dfrac{6}{D_\text{in}+D_\text{out}}}\right)\).
如果激活函数使用ReLU,使用 Kaiming initialization / MSRA initialization:\(W_{ij}\sim \mathcal{N}\left(0,\dfrac{2}{D_{\text{in}}}\right)\).
对于 ResNet,将第一个卷积层 Kaiming 初始化,第二个卷积层全部初始化为0.这样每一个残差块输入输出方差不变.
1 2 3 4 5 | |
1.4 Regularization
正则化的核心:训练时添加噪声/随机性,测试时把随机性平均/固定(Dropout、BatchNorm都是类似).
1.4.1 Add term to loss
与之前介绍过的一样,使用 L1/L2 正则化、Weight Decay 等.
1.4.2 Dropout
每一次前向传播时随机屏蔽掉一些神经元的数值,一般概率取0.5.强制使网络的特征具有冗余,防止神经元都适应相同的特征.
在测试时,我们希望输出稳定下来,于是将训练时的期望输出作为测试输出,也就是不 drop 任何神经元,而是乘以其被 drop 的概率.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 | |
在实际应用中,更常见的是 Inverted Dropout:训练时 drop 后除以 p,测试时不动.这样就和其他模型的测试统一了.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 | |
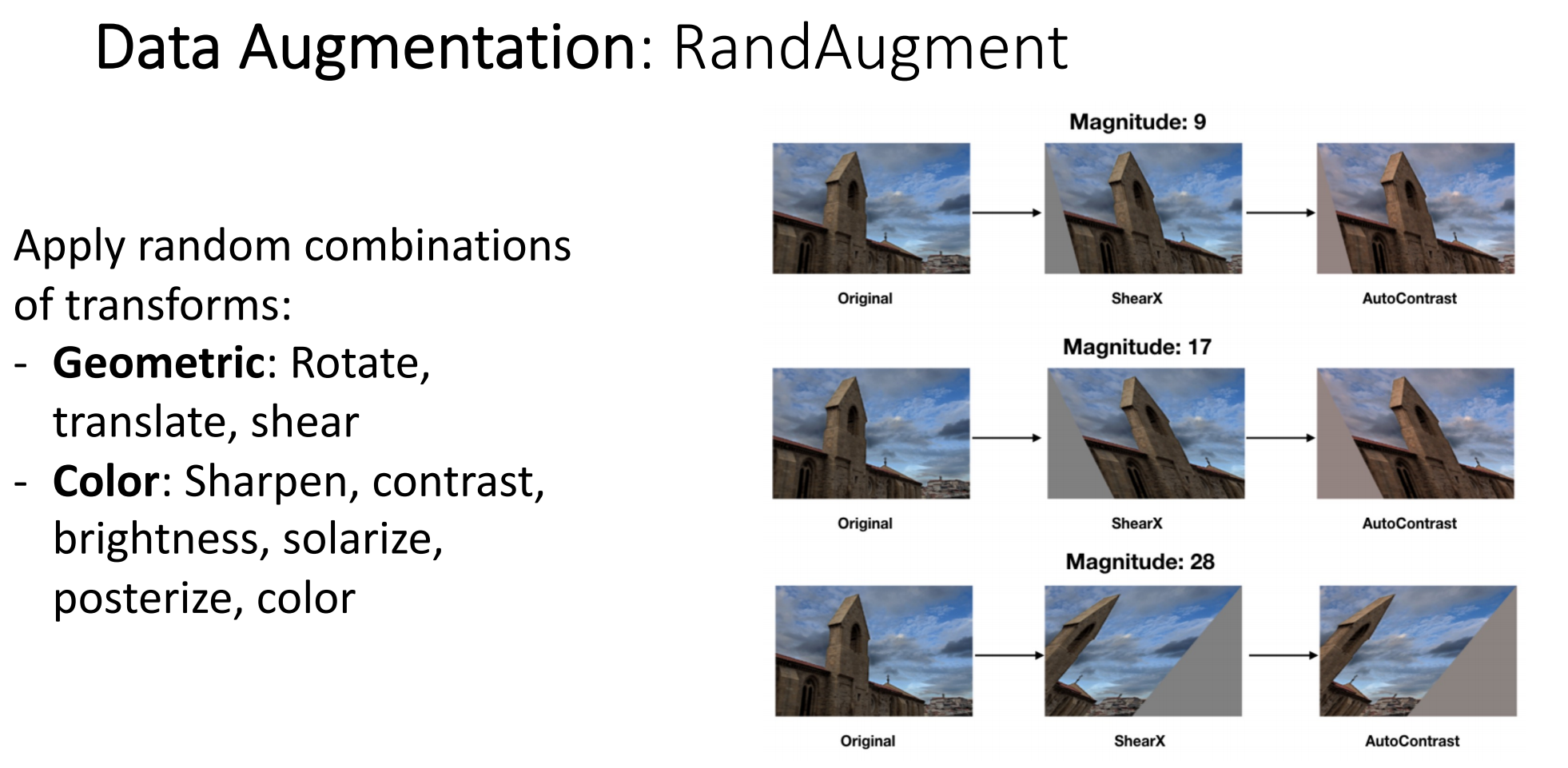
1.4.3 Data Augmentation
将图像增强,可以增加数据数量、提升模型泛化能力.
Horizontal Flips:把图片左右翻转.
Random Crops and Scales:以 ResNet 为例
- 训练时:随机选取一个 \(L\in [256,480]\),将原图等比缩放使得短边长为 \(L\),再截取处 \(224\times 224\) 的 patch;
- 测试时:将原图等比放缩为 \(\{224, 256,384,480,640\}\),对于每个尺寸选择10个 \(224\times 224\) 的crop,一般为四角+中心,以及他们的翻转.
Color Jitter:随机改变亮度、对比度;或者复杂些,对训练集所有 RGB 像素做 PCA,然后沿主成分方向加颜色扰动.
RandAugment:组合不同的变换,如旋转、平移、剪切、锐化等.
几种少用的正则化方法
- DropConnect:随机将神经元之间的连接 drop;测试时使用完整连接.
- Fractional Pooling:池化层的 Kernel 大小不固定,可以这一块 \(2\times 2\) 最大池化后,下一块 \(1\times 2\) 最大池化;测试时对不同 sample 的预测做平均.
- Stochastic Depth:在 ResNet 中随机跳过一些残差块,测试时使用完整网络.这个思想后来在 EfficientNetV2、Vision Transformer 等架构中也常见.
- Cutout:将图像的某些区域遮住(设为0或者噪音);测试时用完整图.
- Mixup:将两个图像按比例混合,然后 label 设为两个类别的占比(如cat 0.4,dog 0.6);
- Cutmix:不是整张图线性混合,而是把一张图的一块区域替换成另一张图的 crop,标签按面积比例混合;
- Label Smoothing:不再把正确类别设成 100%,而是比如 cat:90%,其他类别分一点概率。这样可以避免模型过度自信.
在实际使用时,大型全连接层可以用 Dropout;图像任务里用 Data Augmentation;CNN 也常用 BatchNorm.其他正则化方法如果想再挤一点性能可以使用.
2. Training dynamics
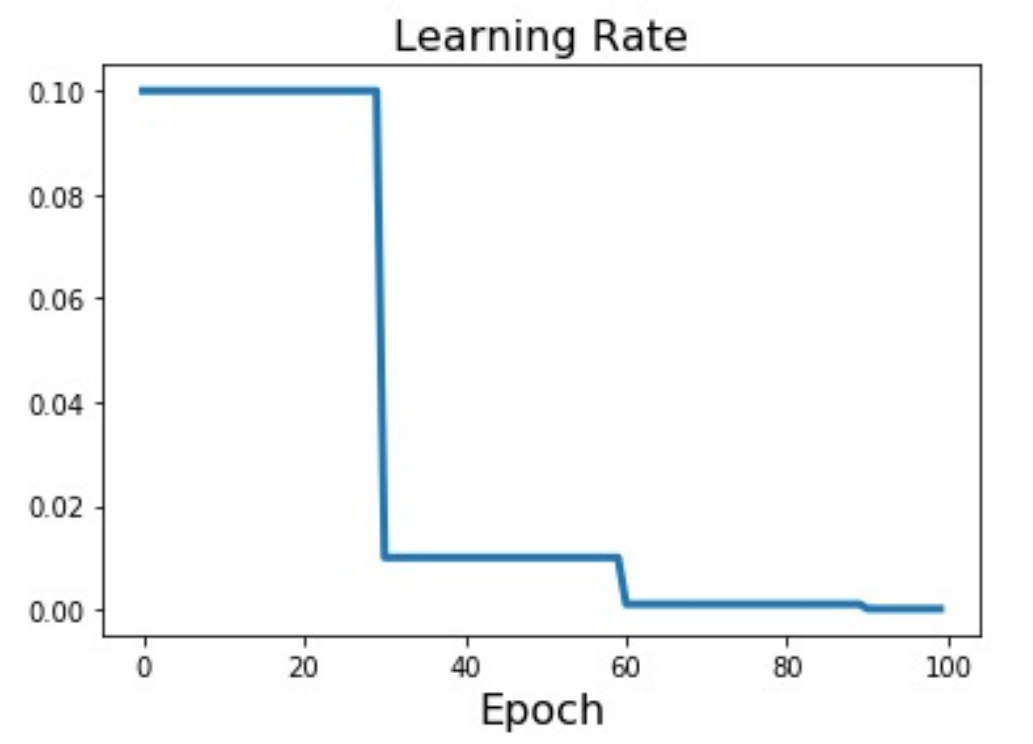
2.1 Learning Rate Schedule
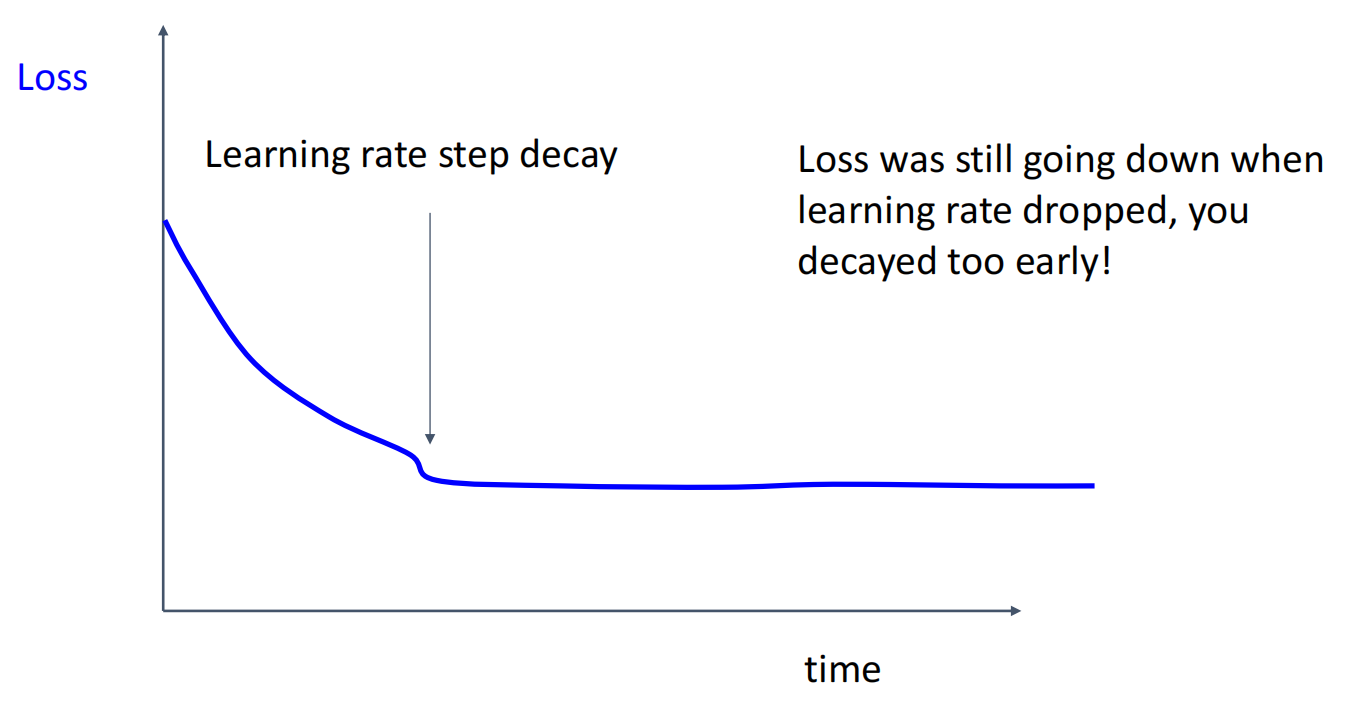
学习率调度的核心:一开始用较大学习率快速下降,后面逐渐减小学习率精细收敛.
Step Decay:在固定 epoch 降低学习率.
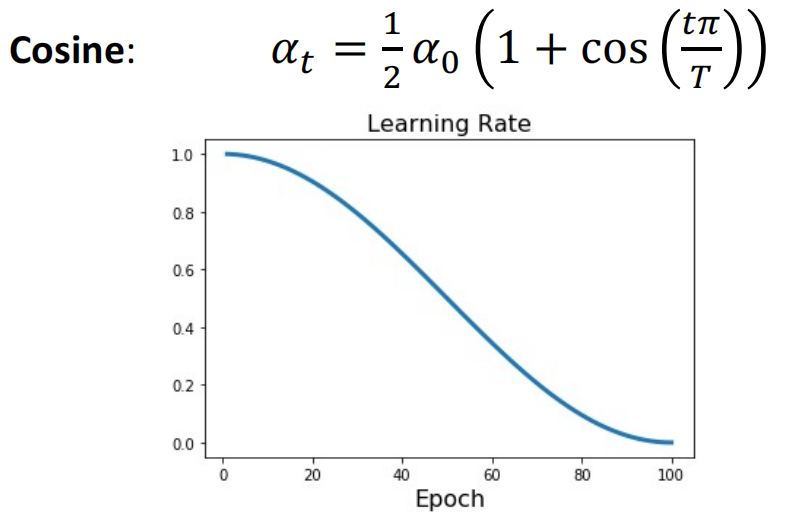
Cosine Decay:按照余弦函数,从初始学习率逐步下降到0.
Linear Decay:线性衰减 \(\alpha_t = \alpha_0(1-\dfrac{t}{T})\).
Inverse sqrt decay:\(\alpha_t = \dfrac{\alpha_0}{\sqrt{t}}\).
训练策略:Early Stopping,当验证集的准确率降低时,停止训练模型.
2.2 Choosing Hyperparameters
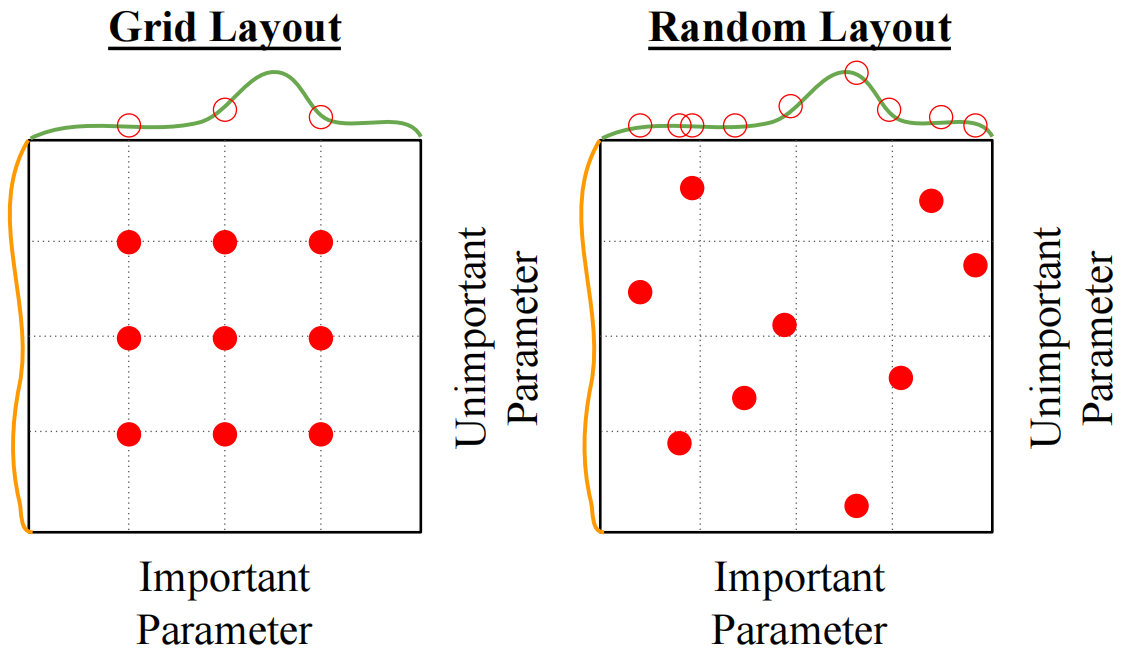
Grid Search:为每个超参数选择几个值 (搜索空间通常是对数线性的),计算这个超参数网格中所有可能的选择.
Random Search:为超参数的值划定一个范围 (通常同样在对数空间上),超参数在空间中均匀随机分布
没有大量算力的情况下选择超参数的方法:
1.Check initial loss
检查模型刚初始化时的 loss 是否合理,如使用 softmax 分类,随机初始化时初始 loss 应该接近 \(\ln C\).这一步建议关掉 weight decay.
2.Overfit a small sample
拿 5-10 个训练数据,关掉正则化,尝试把这小部分数据训练到接近 100%,确认模型至少有能力拟合一小块数据.
3.Find LR that makes loss go down
用完整训练集,打开一个小的 weight decay,然后找一个能让 loss 在前约 100 iterations 明显下降的 learning rate.LR 可以先尝试 \([10^{-1},10^{-2},10^{-3},10^{-4}]\).
4.Coarse grid, train for 1-5 epochs
在 Step 3 找到的大致 learning rate 附近,做粗略搜索;可以尝试 learning rate 与 weight decay 的不同组合.
5.Refine grid, train longer
从 Step 4 里面挑表现好的组合,在更小范围内细调.可以训练的更久,如 10-20 epochs.
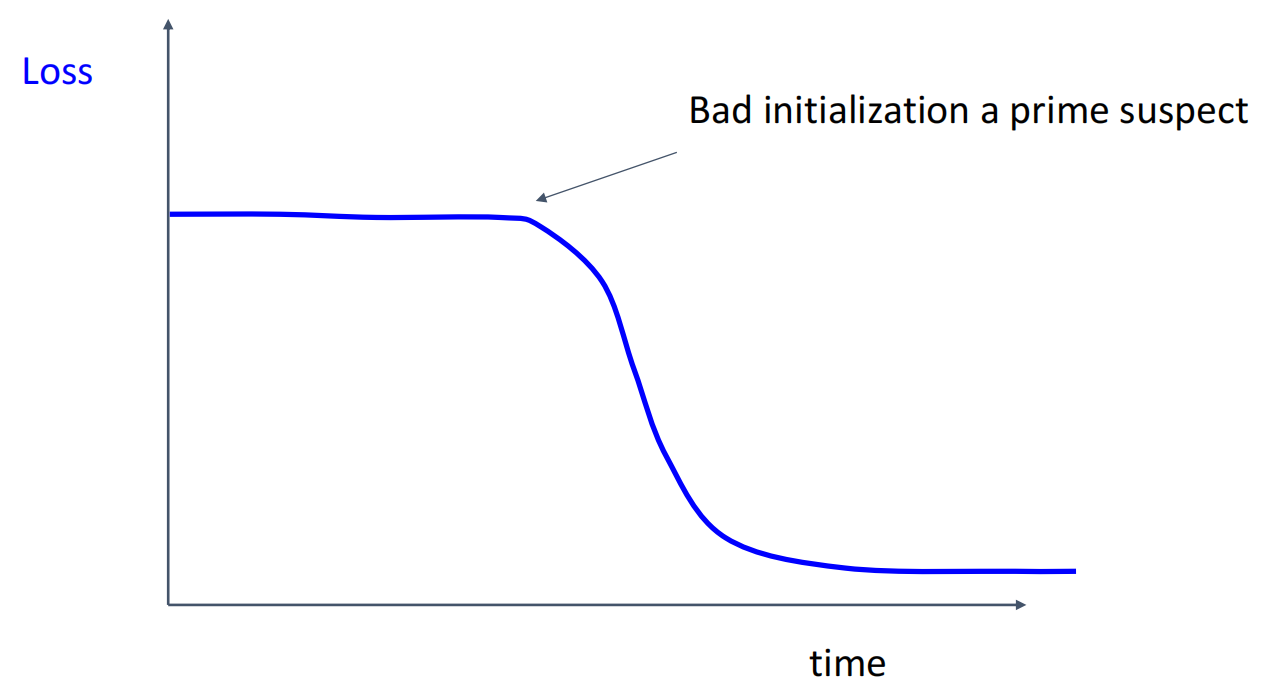
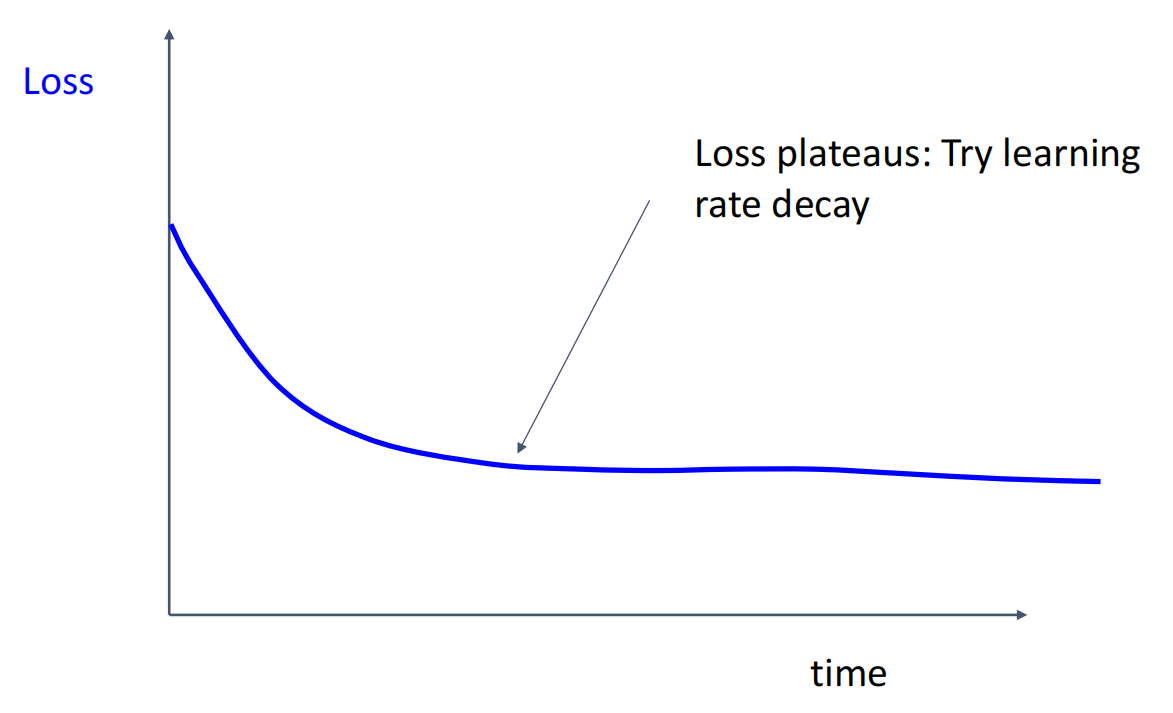
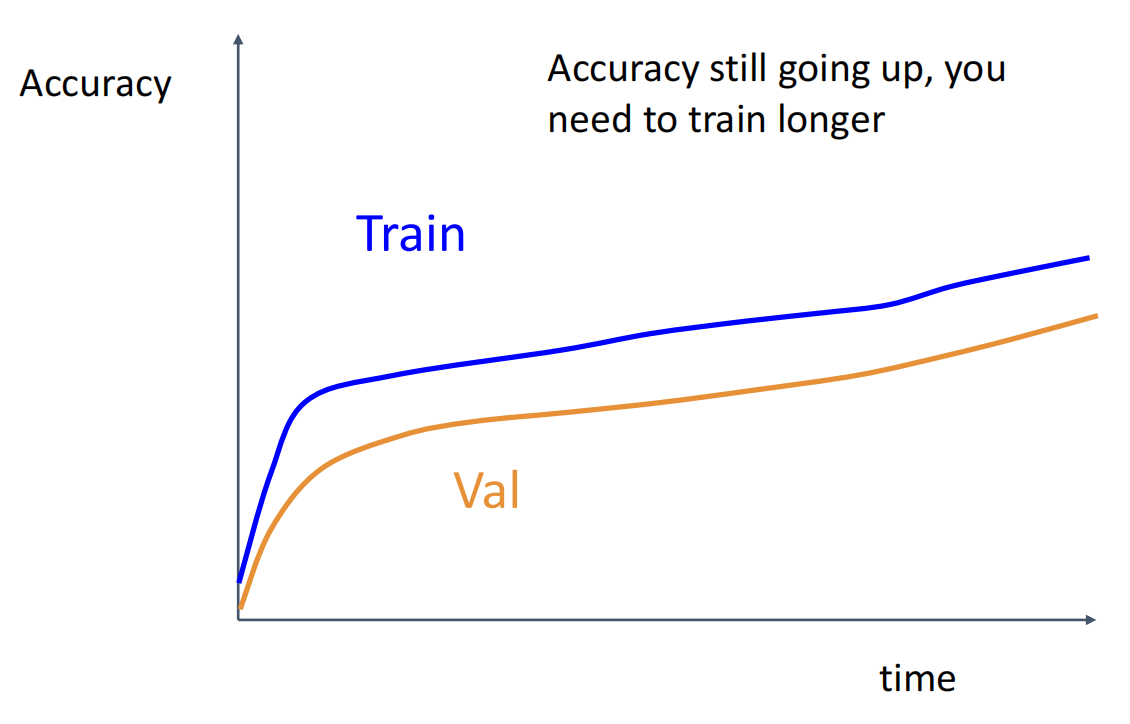
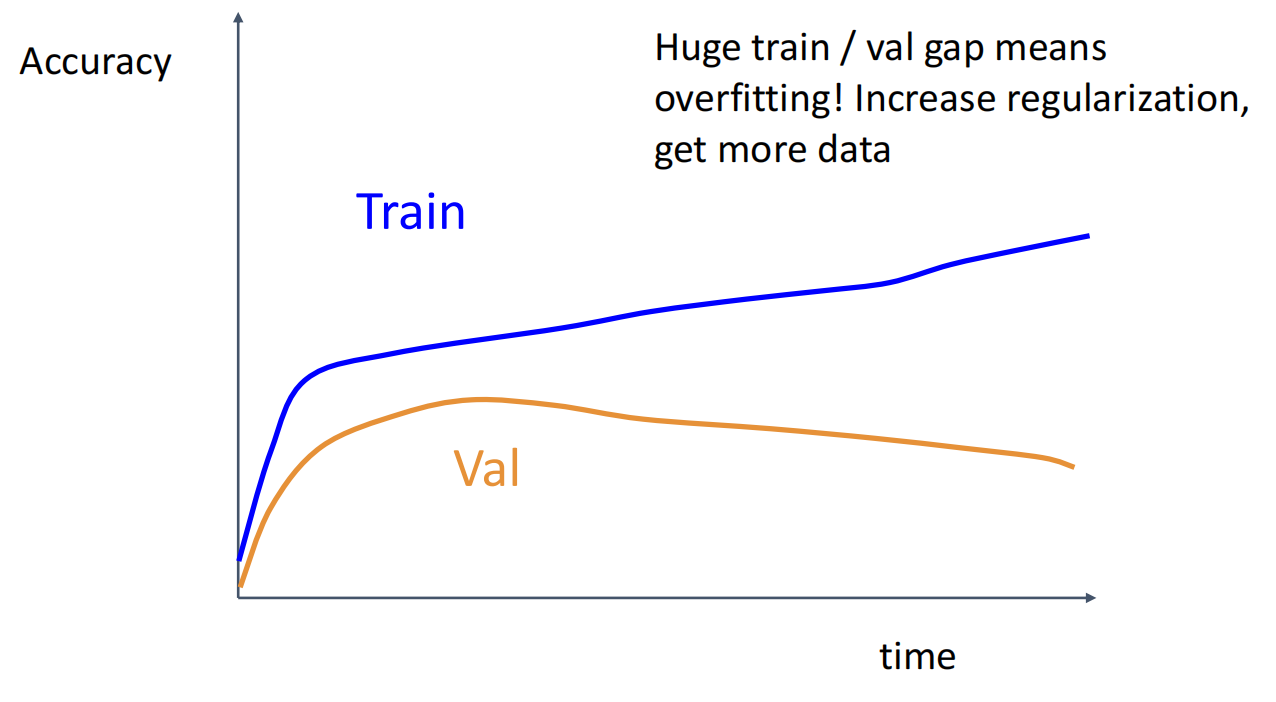
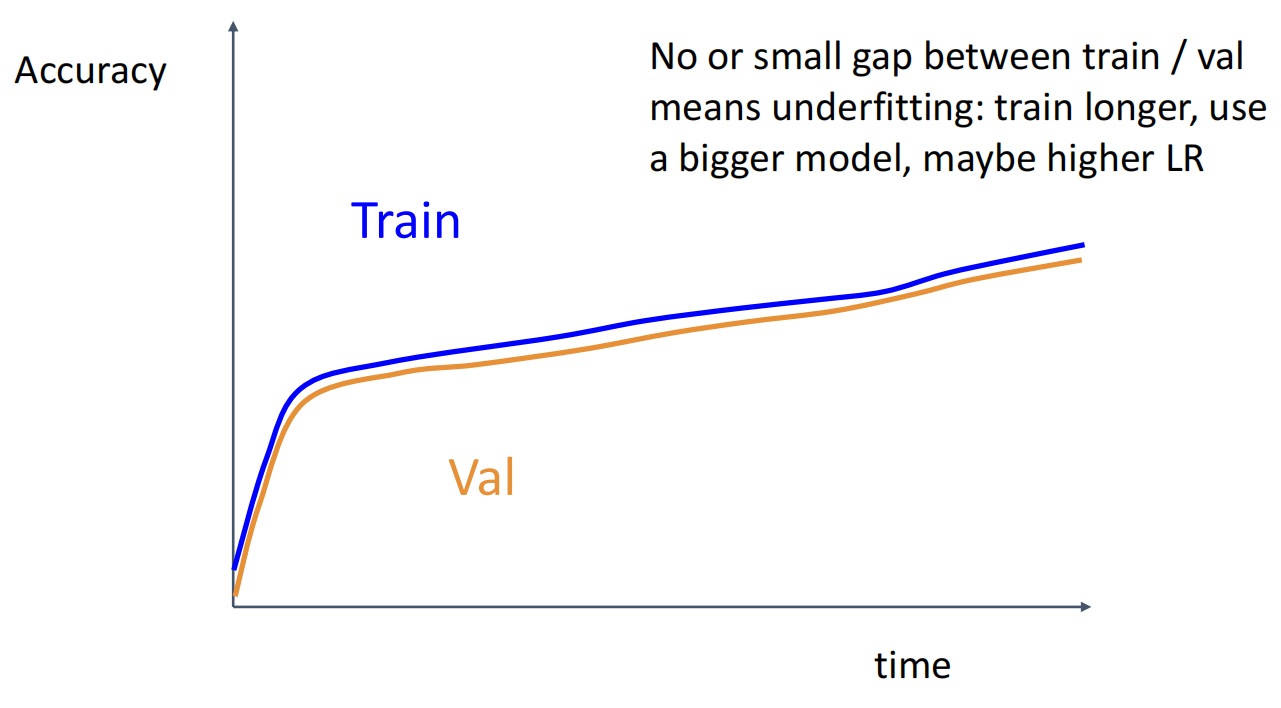
6.Look at learning curves
观察训练曲线,判断哪里出了问题.
曲线对应问题
7.回到第 5 步,反复迭代直到找到最佳超参数.
3. After training
3.1 Model Ensemble
训练多个独立模型,测试时平均它们的预测概率分布再选出分类结果,大概能获得 2% 的额外性能.
tips
-
不用真的训练多个模型,而是在一个模型训练过程中保存多个 checkpoint,用这些 checkpoint 做 ensemble.
-
在测试时使用参数的动态平均而不是最后的参数.
1 2 3 4 5 6
while True: data_batch = dataset.sample_data_batch() loss = network.forward(data_batch) dx = network.backward() x += -learning_rate * dx x_test = 0.995 * x_test + 0.005 * x
3.2 Transfer Learning
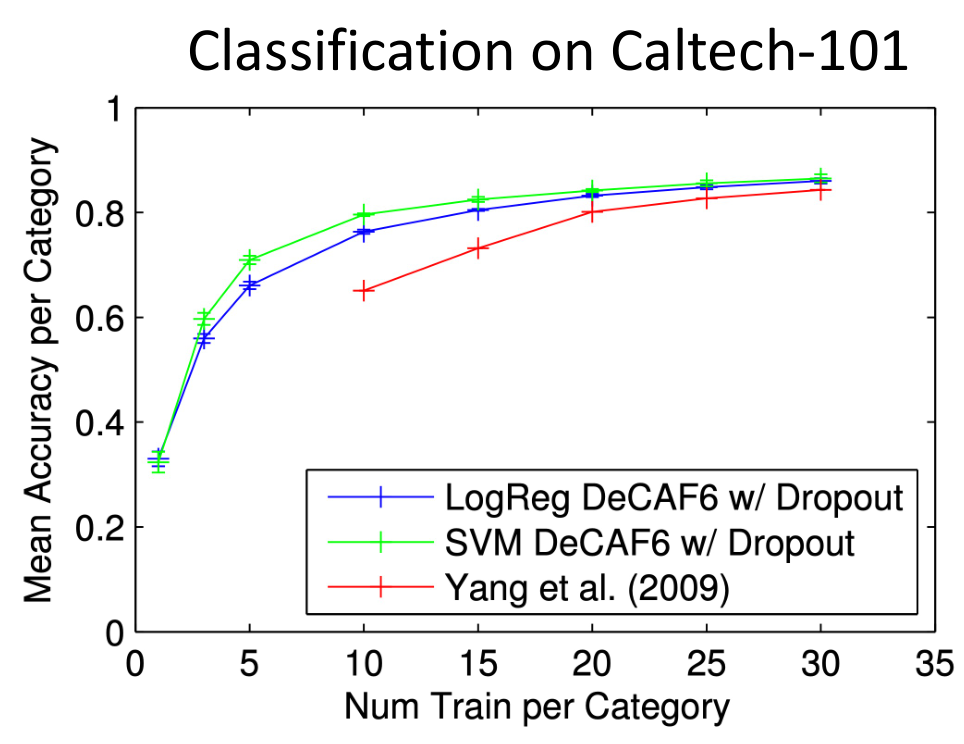
由于 CNN 的前面几层主要起到特征提取的通用作用,因此当数据量较小时,可以拿现成的 CNN,将前面的层直接拿来用,改造最后的输出层为我们需要的功能.
将在 ImageNet 上预训练完成的 VGG,改造最后的输出层并用于 Caltech-101 数据集上训练,每一个类别只需要很少的数据就能得到很高的正确率.
Linear Probe:冻结前面的网络,只训练分类头
Fine-Tuning:帮整个网络放开,在原来网络的基础上进行微调学习