Neural Networks
约 2223 个字 32 行代码 16 张图片 预计阅读时间 12 分钟
神经网络可以看作一系列可学习的特征变换,反向传播则提供了高效计算梯度的方法.
1. Feature Transformation
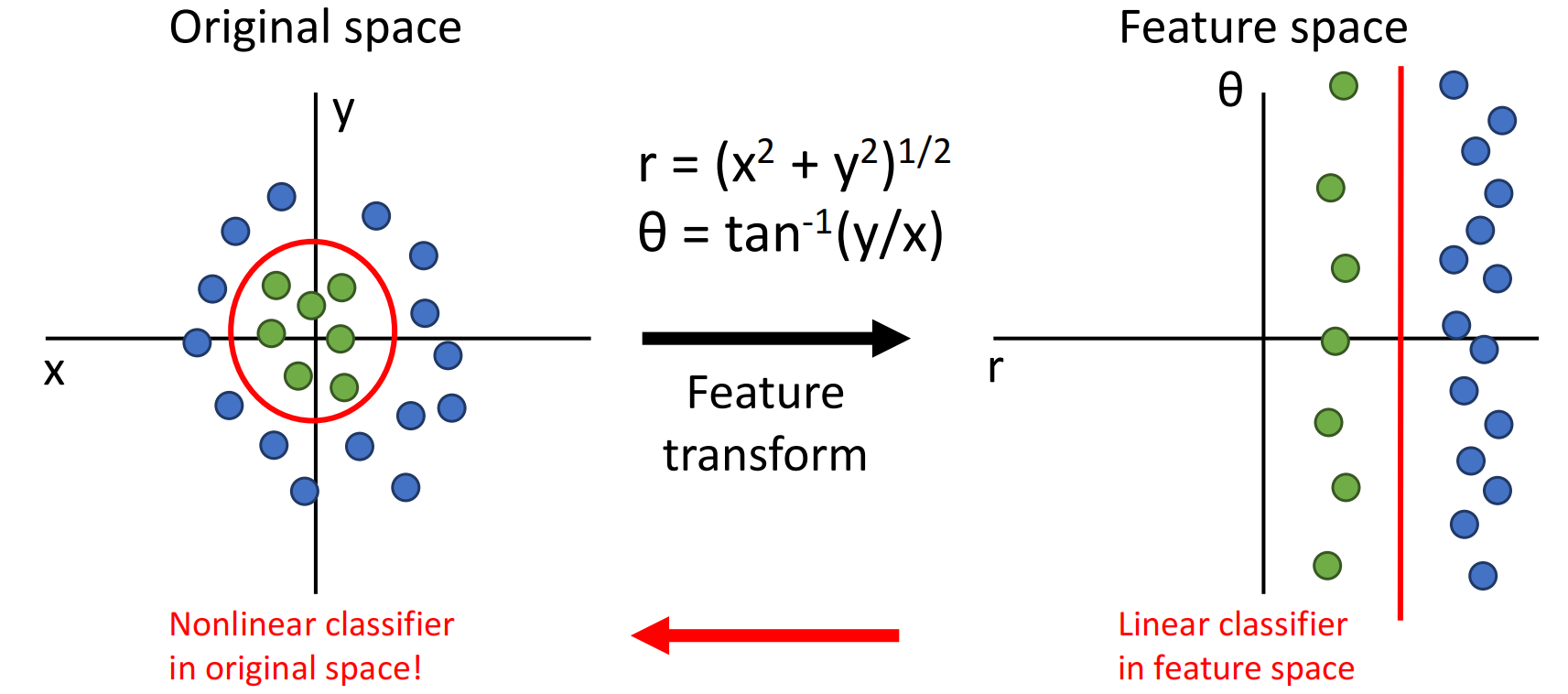
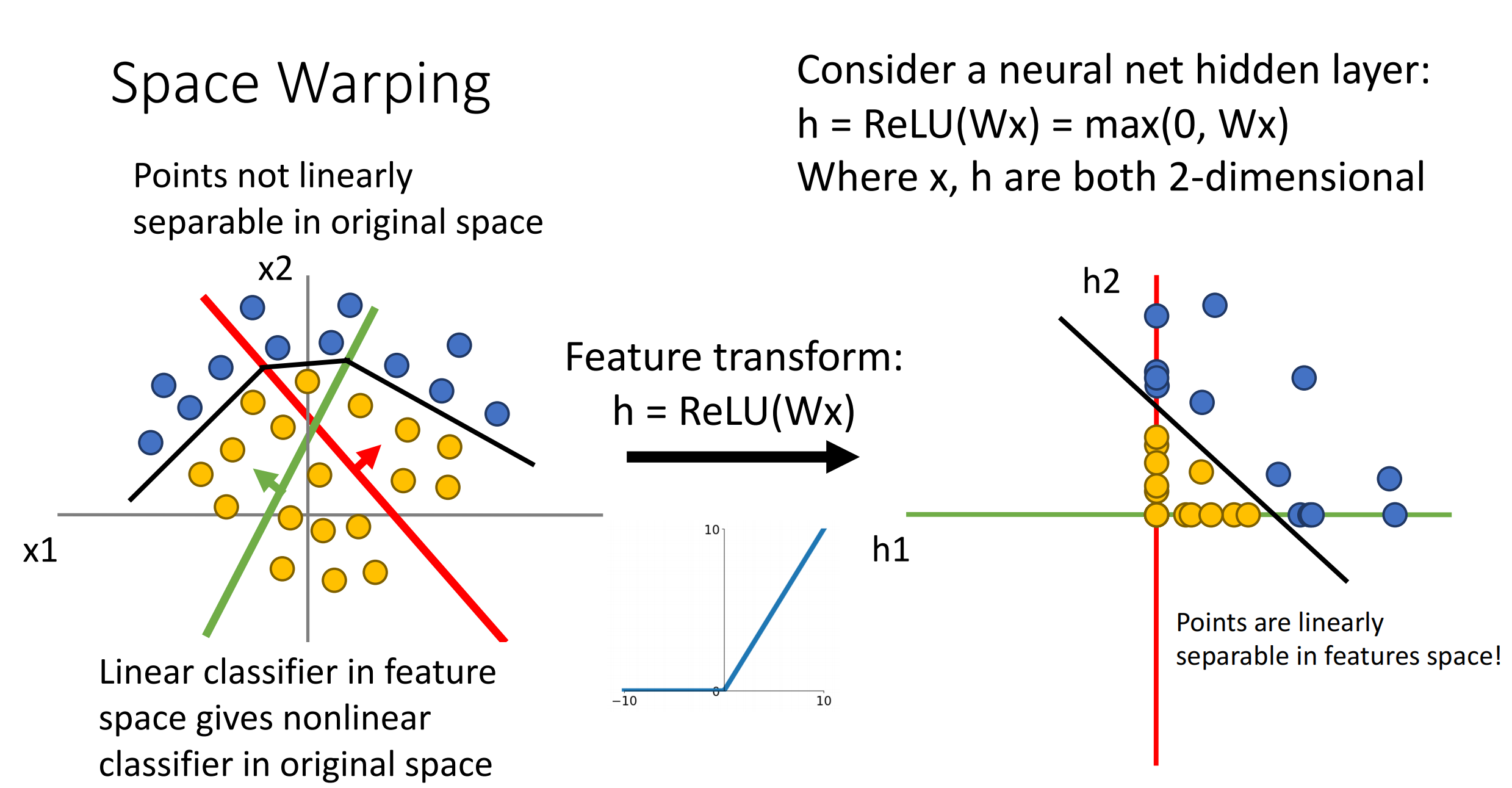
一些特征变换可以将在原空间下线性不可分的数据,在特征空间下变得线性可分.如下图,原空间在笛卡尔坐标下难以分类,但使用极坐标可以很容易得分类出来.
提示
在此语境下的特征变换为feature transformation.要注意此处的特征为feature,不要与线性代数中的特征弄混了,特别是特征值(feature value, eigenvalue)与特征向量(feature vector, eigenvector).
CV 历史上还使用过:
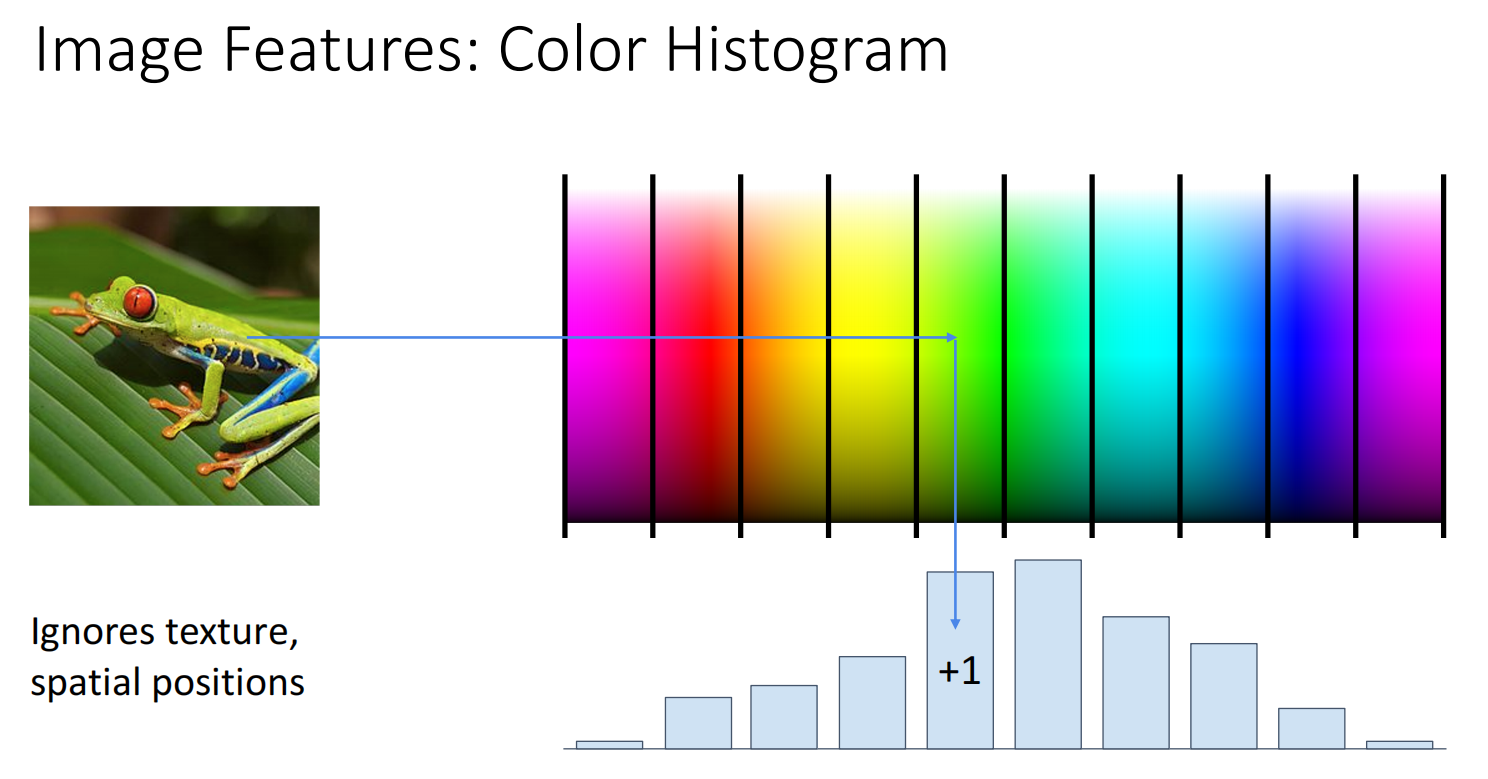
- Color Histogram(颜色直方图):将颜色空间分成很多桶,对图像颜色做频数统计.忽略颜色出现的空间位置,只关心出现频率.
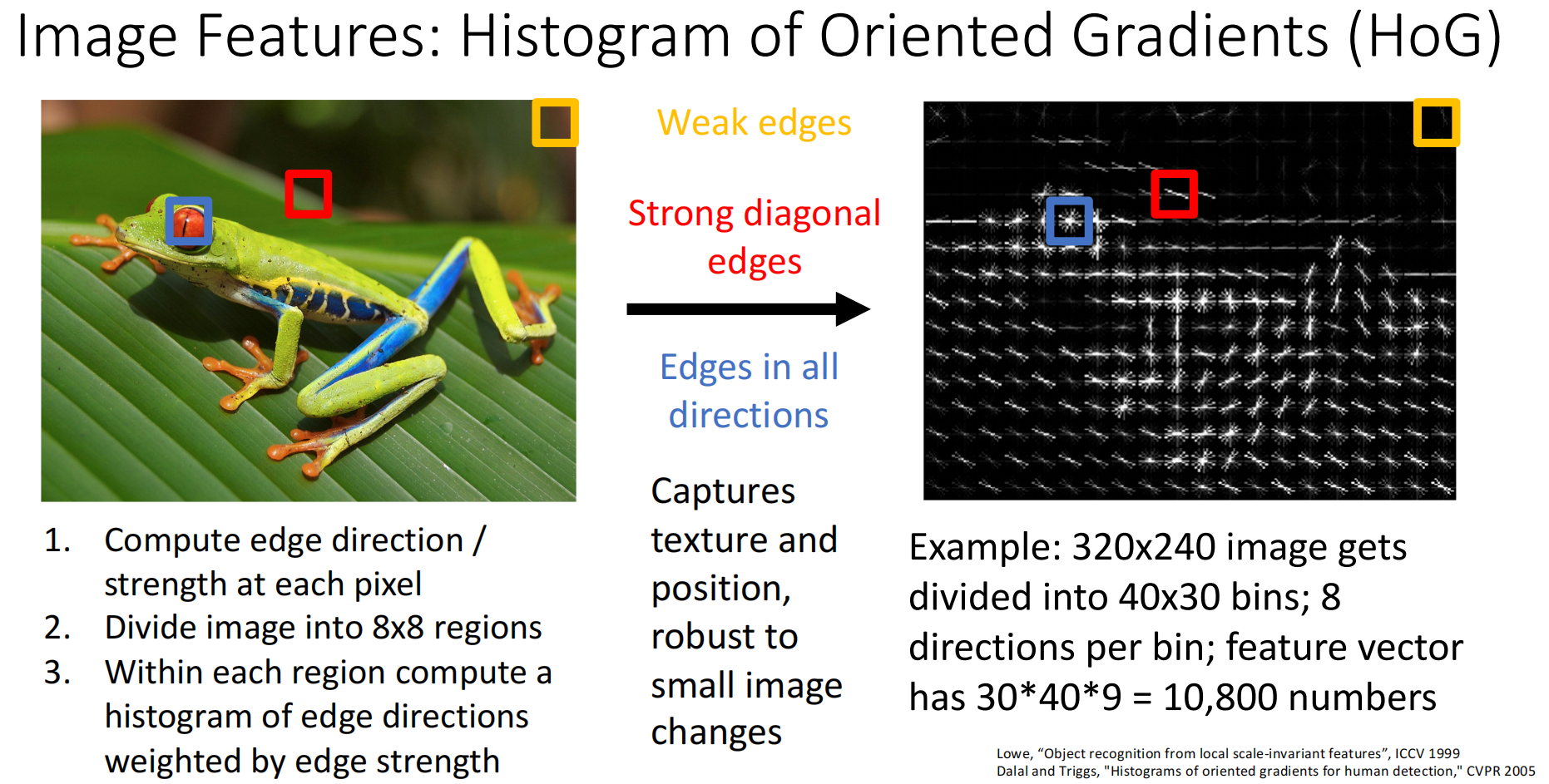
- Histogram of Oriented Gradients(方向梯度直方图特征):将图像切成数个小区域(如 \(8\times 8\) pixel),统计小区域的方向朝向.
2. Neural Networks
线性分类器只使用 \(f(x)=Wx+b\),无法表示非线性的分类界限.而神经网络通过多层线性分类与非线性的激活函数,实现非线性分类,并且能从原始数据中自动学到合适的特征表示.
常用的激活函数
激活函数必须是非线性的,以下函数都可以作为激活函数:
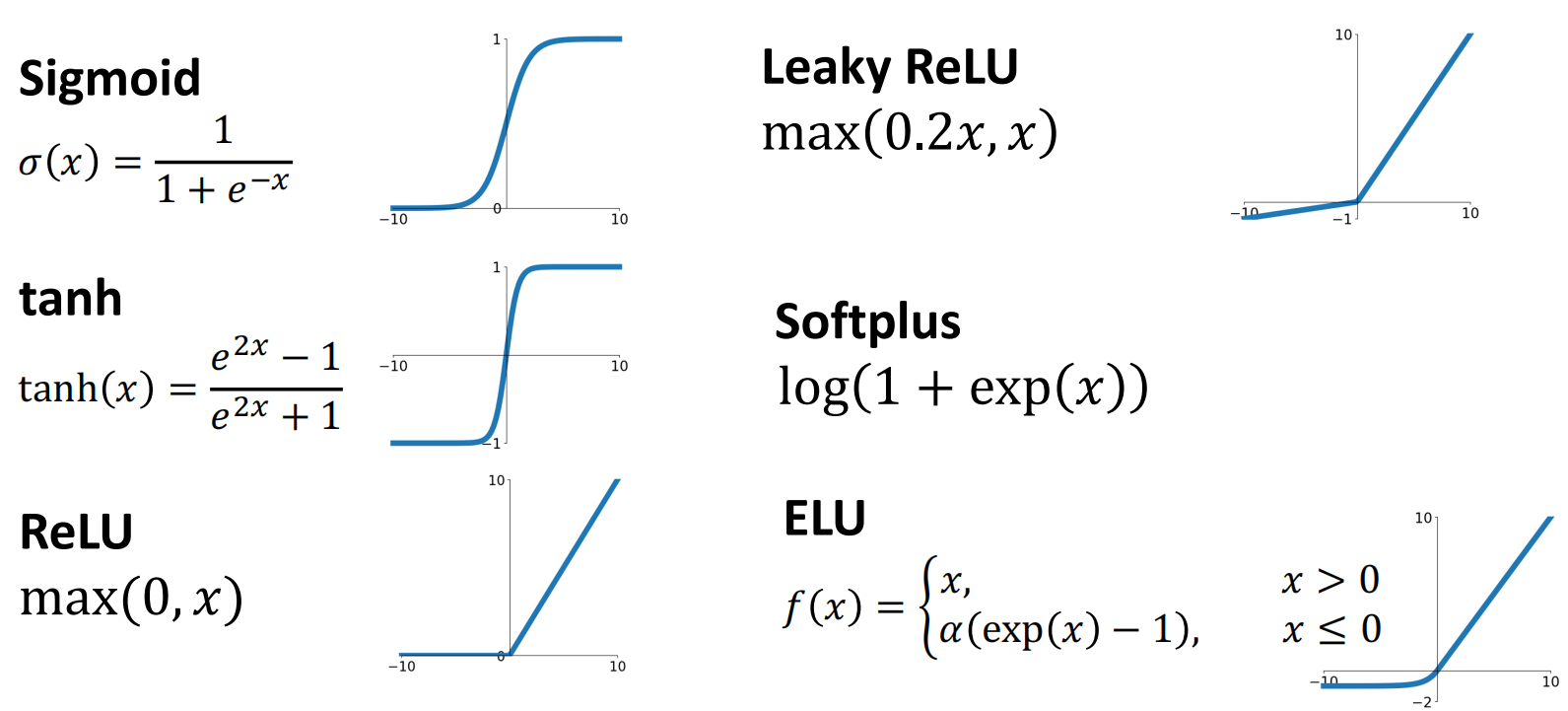
在本节课中我们默认使用ReLU,因为其使用的更加广泛,且函数较为简单(反向传播时导数只可能为0或1).
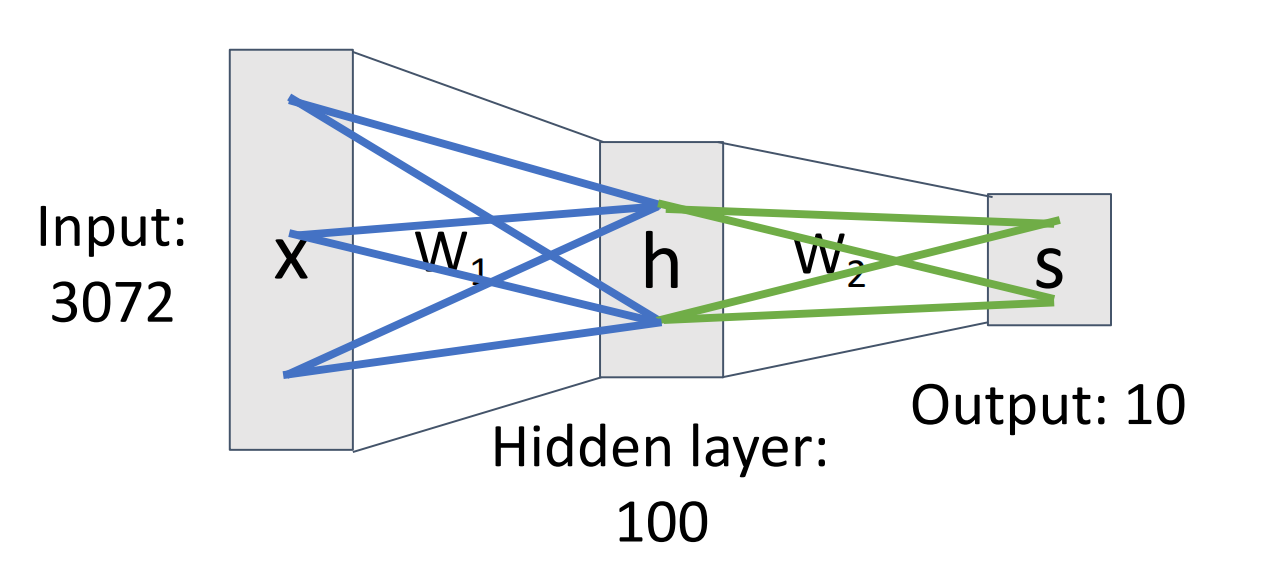
以二层神经网络为例,其形式为 \(f(x)=W_{2}\max(0, W_{1}x+b_{1})+b_{2}\).如果输入 \(x\in \mathbb{R}^{D}\),输出 \(f(x)\in \mathbb{R}^{C}\),则有 \(W_{1}\in \mathbb{R}^{H\times D},b_{1}\in \mathbb{R}^{H},W_{2}\in \mathbb{R}^{C\times H},b_{2}\in \mathbb{R}^{C}\).
线性神经网络也被称为多层感知机.神经网络的层数称为其深度,一般来说,深度越深,神经网络的拟合能力越强,也越容易出现过拟合;我们需要加入正则化项来防止过拟合(而不是通过减小深度来实现).
由于非线性激活函数的存在,其可以实现在原坐标系下的非线性边界.理论上,神经网络可以拟合所有 \(\mathbb{R}^{N}\to \mathbb{R}^{M}\) 的任意连续函数.
3. Backpropagation
对于函数 \(f\),不妨其具有输入 \(x,y\),输出 \(z\),并且我们已知最终的结果 \(L\) 关于输出 \(z\) 的偏导 \(\dfrac{\partial{L}}{\partial{z}}\),那么就能用链式法则得到:
$$ \begin{aligned} &\dfrac{\partial{L}}{\partial{x}}=\dfrac{\partial{z}}{\partial{x}}\cdot \dfrac{\partial{L}}{\partial{z}} \ &\dfrac{\partial{L}}{\partial{y}}=\dfrac{\partial{z}}{\partial{y}}\cdot \dfrac{\partial{L}}{\partial{z}} \end{aligned} $$ 即为反向传播的本质.其先求出输出的偏导,再求出输入的偏导,因此为“反向”.其中:
- \(\dfrac{\partial{L}}{\partial{z}}\):作为已知数据,称为upstream gradient(上游梯度).
- \(\dfrac{\partial{z}}{\partial{x}},\dfrac{\partial{z}}{\partial{y}}\):称为local gradient(局部梯度).
- \(\dfrac{\partial{L}}{\partial{x}},\dfrac{\partial{L}}{\partial{y}}\):称为downstream gradient(下游梯度).
显然,下游梯度=局部梯度\(\times\)上游梯度.
一般而言,计算函数值时使用正向传播,而计算偏导时使用反向传播.
例
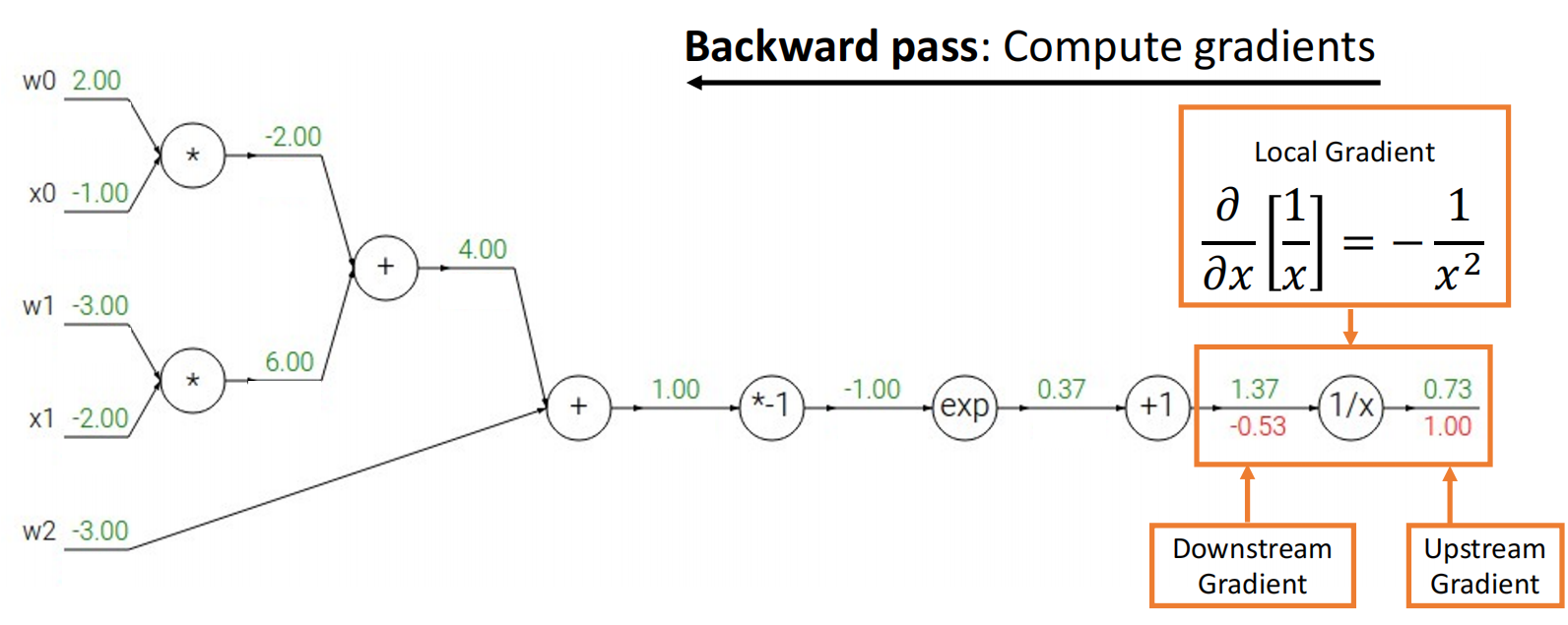
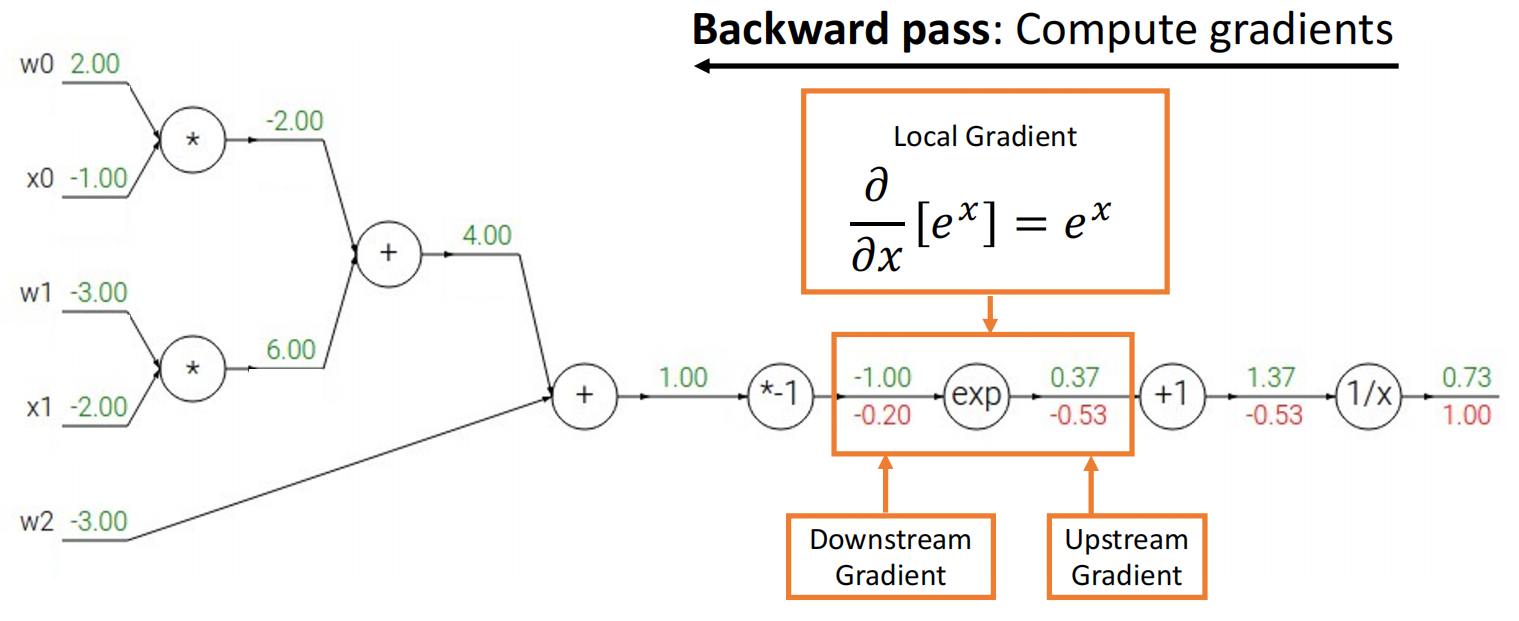
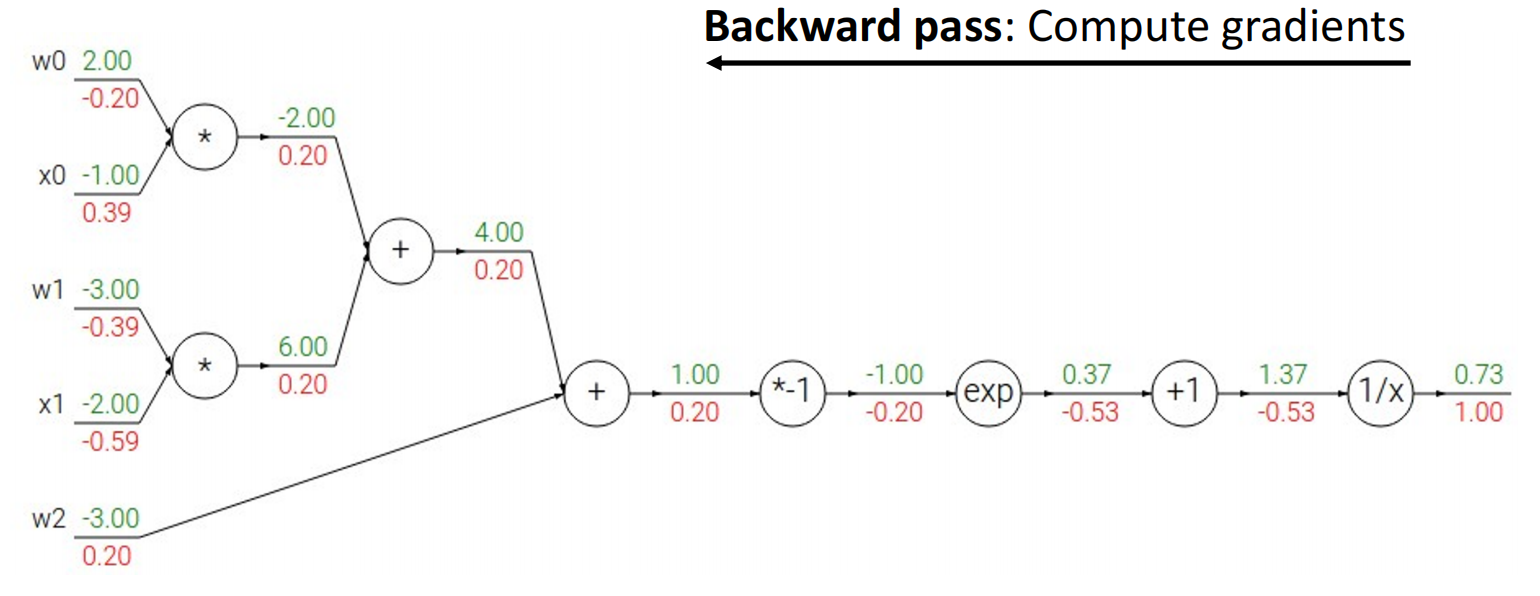
对于函数 \(f(x,w)=\dfrac{1}{1+e^{-(w_{0}x_{0}+w_{1}x_{1}+w_{2})}}\),给出其计算图:
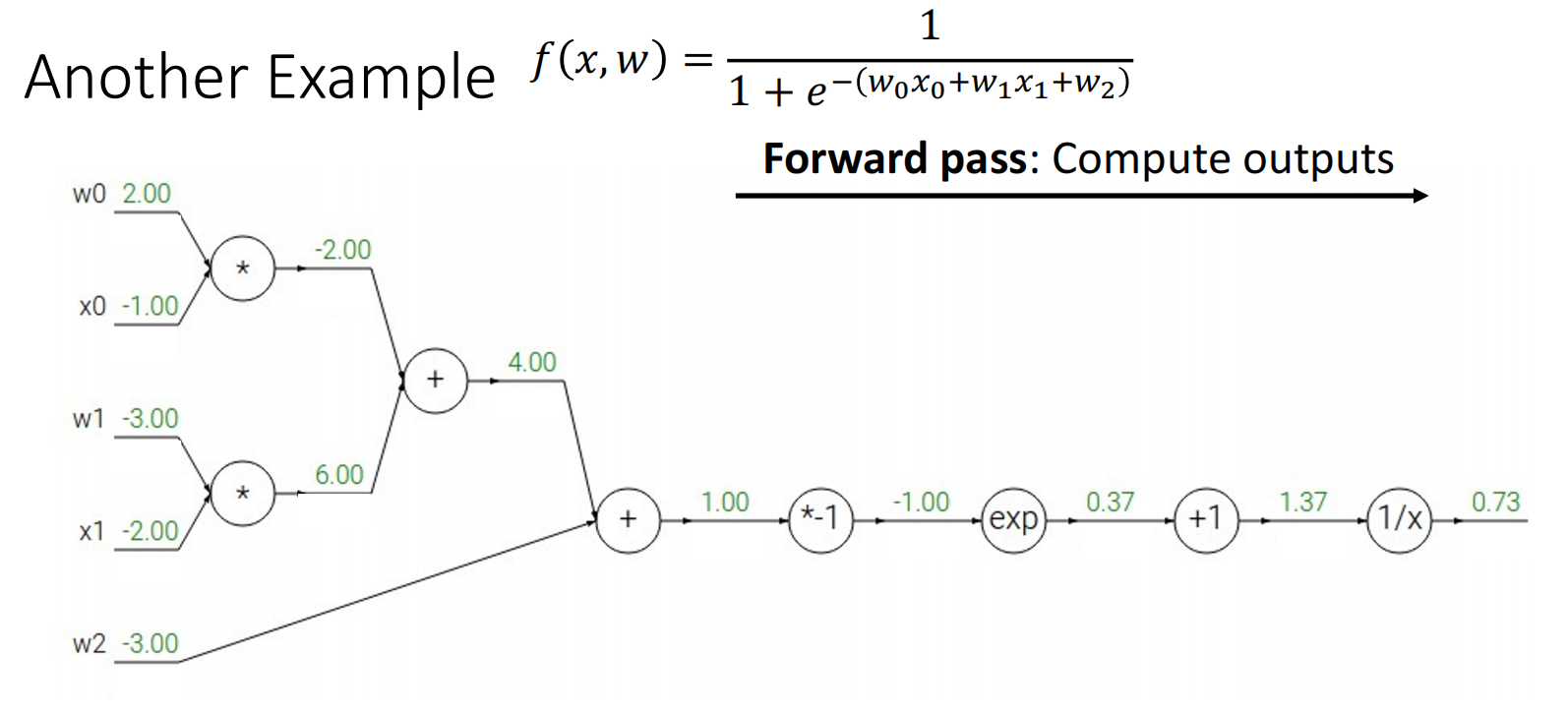
不妨设最后的结果即为目标 \(L\).显然 \(\dfrac{\partial{L}}{\partial{L}}=1\);对于函数 \(f(x)=\dfrac{1}{x}\),其输入为 \(x=1.37\),输出为 \(y=0.73\);因此我们得到 \(\dfrac{\partial{L}}{\partial{x}}=-\dfrac{1}{x^{2}}=-\dfrac{1}{1.37^{2}}\approx 0.53\).
然后是函数 \(f(x)=e^{x}\),其输入为 \(x=-1\),输出为 \(y=0.37\),上游梯度 \(\dfrac{\partial{L}}{\partial{y}}=-0.53\),因此下游梯度 \(\dfrac{\partial{L}}{\partial{x}}=\dfrac{de^{x}}{dx}\cdot\dfrac{\partial{L}}{\partial{y}}=\dfrac{1}{e}\cdot 0.53\approx 0.20\).
3.1 Gradient Flow
我们可以预处理一些常用操作的梯度规律,使得运算时可以直接查表.
例
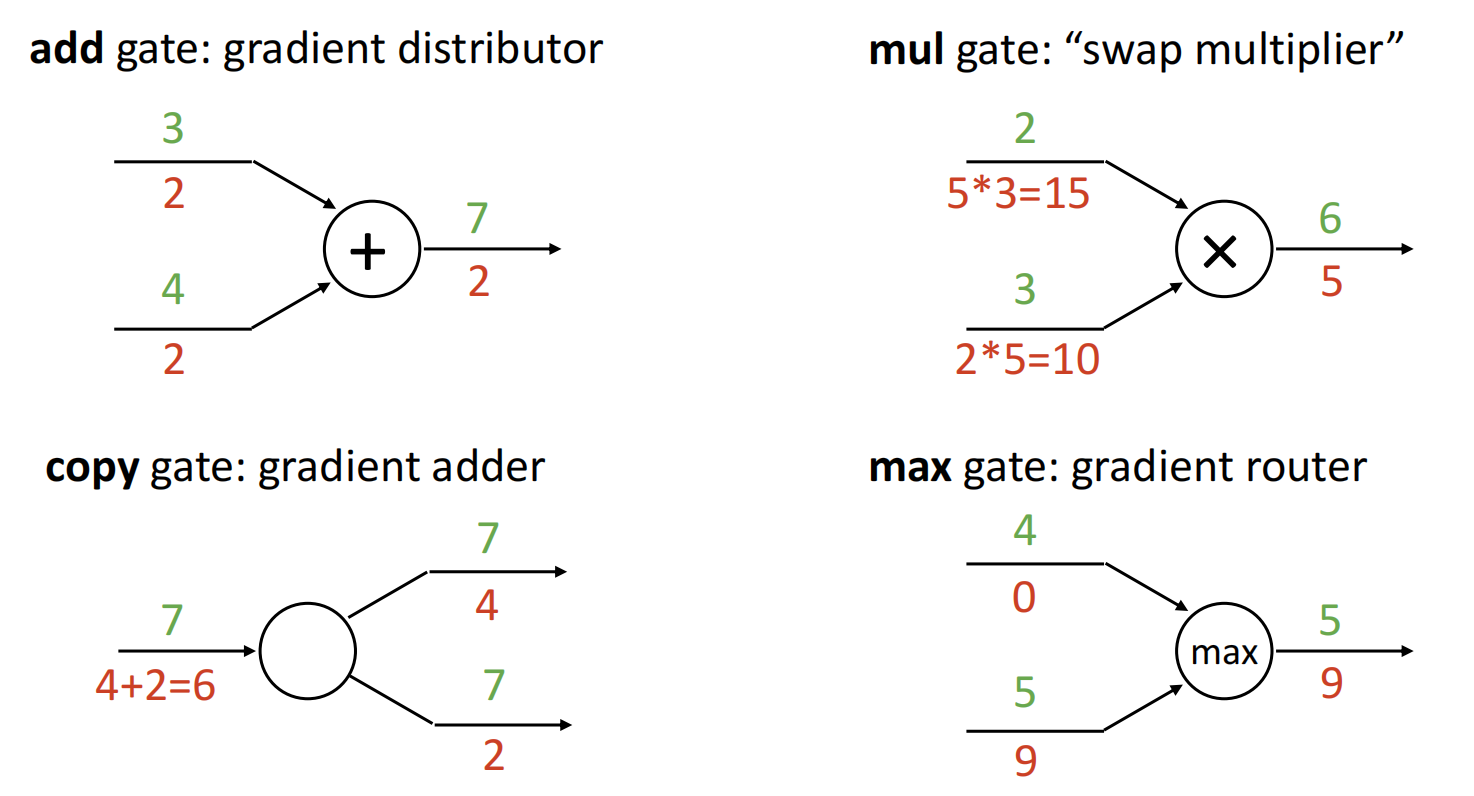
- add gate:\(f(x,y)=x+y\),此时两边的局部梯度均为1,下游梯度与上游梯度相等.
- mul gate:\(f(x,y)=xy\),此时两边的局部梯度为另一个变量.
- copy gate:\(f(x)=(x,x)^T\),此时为向量值函数,其局部梯度为 \(J_f=\left(\dfrac{\partial{x}}{\partial{x}},\dfrac{\partial{x}}{\partial{x}}\right)^{T}=(1,1)^{T}\),下游梯度为上游梯度相加.
- max gate:\(f(x,y)=\max(x,y)\),此时较大者局部梯度为1,较小者局部梯度为0.
类似的,之前例子中的 \(\dfrac{1}{1+e^{-x}}\) 是sigmoid函数,其也可以预处理,得到
可以对求偏导的过程进行很大程度上的化简.
代码
我们可以通过正向传播求函数值+反向传播求偏导的方式,模拟出来代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 | |
PyTorch 也提供了 torch.autograd.Function 基类,我们可以继承该基类,实现自己的函数方法;之后调用该方法,PyTorch 就会帮我们自动求导:
1 2 3 4 5 6 7 8 9 10 11 12 13 | |
3.2 Compute Derivatives
向量求导:
考虑 \(f\) 是一个 \(\mathbb{R}^{n}\to \mathbb{R}^{m}\) 的映射,其输入为 \(\boldsymbol{x}=(x_{1},x_{2},\cdots,x_{n})^{T}\)、输出为 \(\boldsymbol{y}=(y_{1},y_{2},\cdots, y_{m})^{T}\),则
该结果是一个 \(m\times n\) 的矩阵,称为Jacobian矩阵,记作 \(J\).
由于 \(L\) 为标量,因此 \(\dfrac{\partial{L}}{\partial{\boldsymbol{y}}}\) 形状与 \(\boldsymbol{y}\) 相同,为 \(m\times 1\);同理 \(\dfrac{\partial{L}}{\partial{\boldsymbol{x}}}\) 形状与 \(\boldsymbol{x}\) 相同,为 \(n\times 1\).由于Jacobian的形状为 \(m\times n\),显然有
例
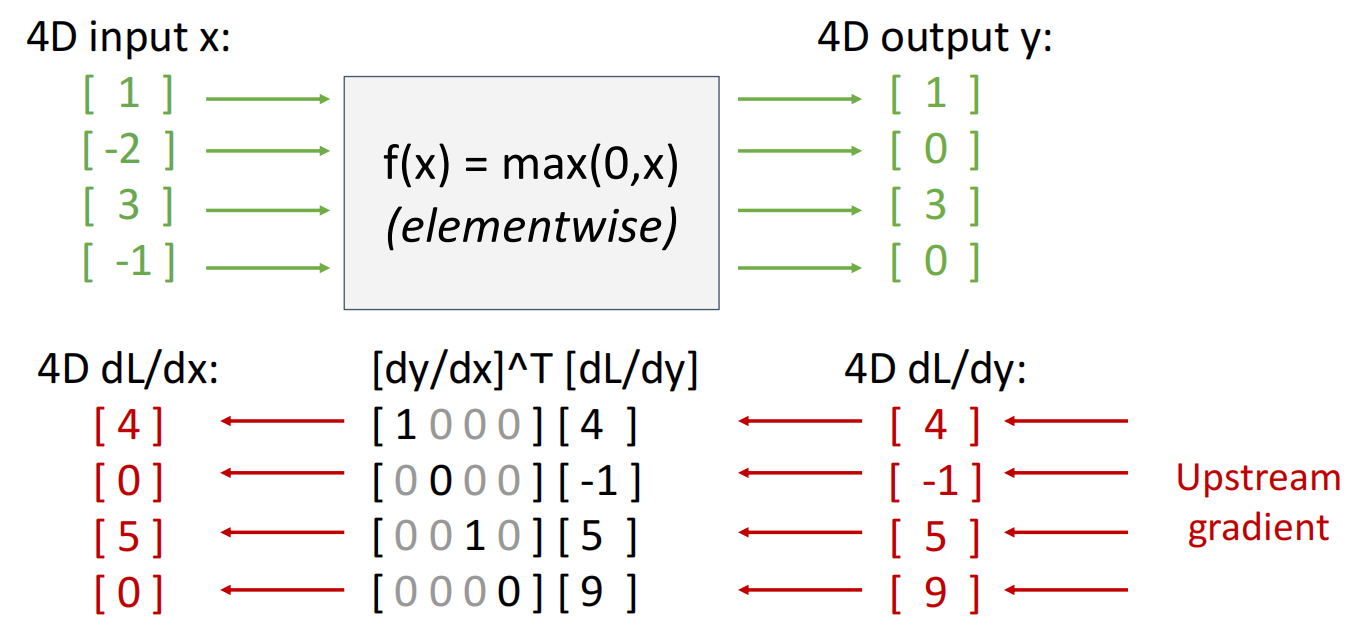
实际上由于存储Jacobian矩阵需要占用大量内存,我们并不显式存储它.我们可以通过如下公式化简:
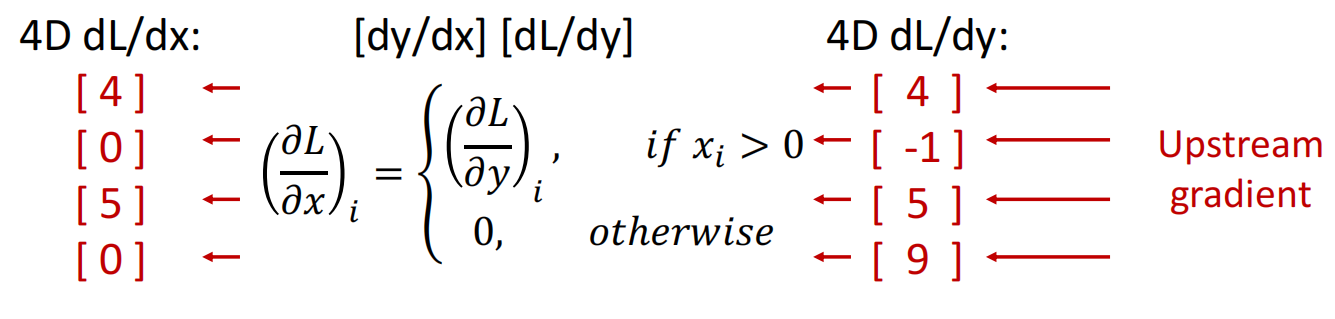
按照上述的想法,如果不存储Jacobian矩阵而想求出所有 \(y_i\) 对 \(x_j\) 的偏导数之和,可以令 \(s=\sum y_i\),然后将 \(s\) 对 所有 \(x_j\) 求偏导即可.这等价于将Jacobian矩阵按照 dim=0 求和.
矩阵求导:
考虑 \(X\in \mathbb{R}^{N\times D},W\in \mathbb{R}^{D\times M}, Y=XW\in \mathbb{R}^{N\times M}\).接下来推导 \(\dfrac{\partial{Y}}{\partial{X}},\dfrac{\partial{Y}}{\partial{W}}\).
首先写出分量形式
我们首先考虑 \(Y_{ab}\) 对单个元素 \(X_{ij}\) 的梯度.带入分量形式,有
其中
由于 \(\delta_{ai}\) 与 \(k\) 无关,因此
而 \(\delta_{kj}\) 相当于把求和里的 \(k\) 选成 \(j\),因此
综上
设上游梯度记为
则对于 \(X_{ij}\),\(\dfrac{\partial{L}}{\partial{X_{ij}}}\) 为所有 \(Y_{ab}\) 链式法则之和
带入之前的公式
因为 \(\delta_{ai}\) 相当于把求和里的 \(a\) 选成 \(i\),因此
我们发现这是一个类似矩阵乘法的形式,将其还原为矩阵乘法,得到
我们可以从矩阵大小角度验证:\(\dfrac{\partial{L}}{\partial{X}}\in \mathbb{R}^{N\times D},\dfrac{\partial{L}}{\partial{Y}}\in \mathbb{R}^{N\times M},W^{T}\in \mathbb{R}^{M\times D}\),结果是符合的.
同理有
这与向量求导的本质相同:由于 \(Y=XW\),我们可以认为 \(\dfrac{\partial{Y}}{\partial{X}}\) 是 \(W\),即 \(J\)(实际上并不是,结果是一个四维张量).
3.3 Another Perspective
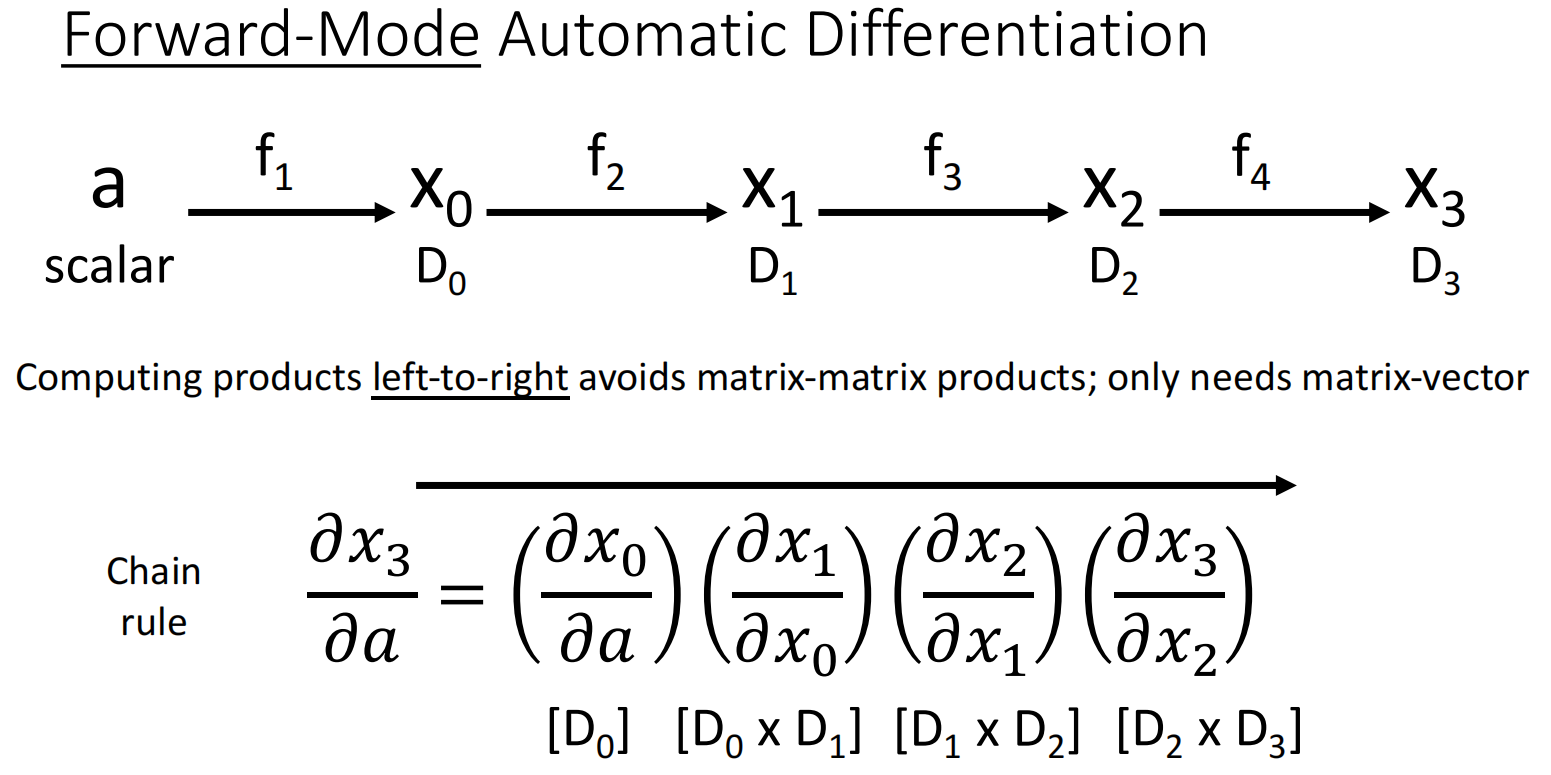
如果是求标量对向量的导数,我们可以反向求,这样每一次的操作都是矩阵\(\times\)向量,而不是矩阵\(\times\)矩阵.
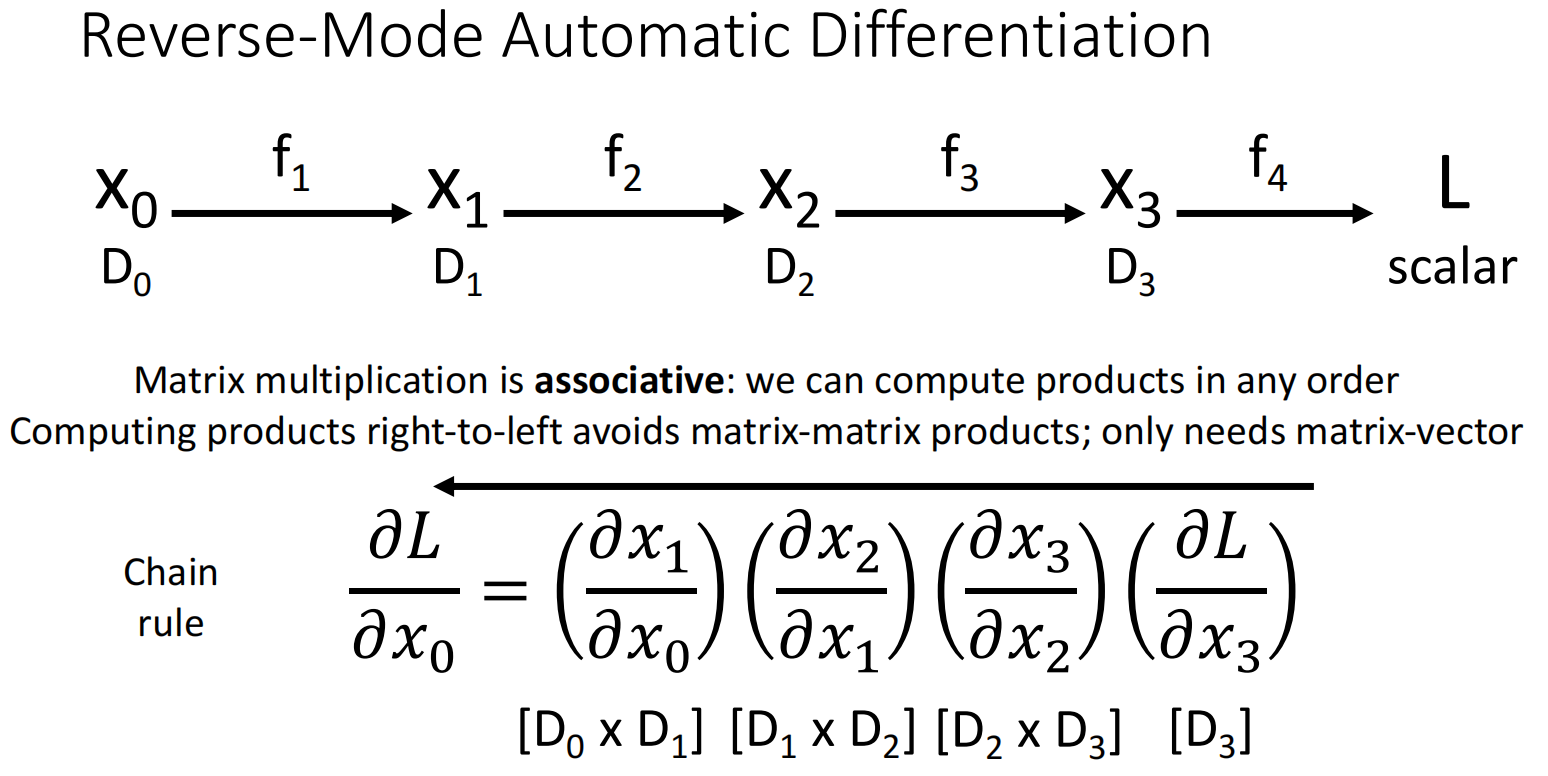
同理,如果是求向量对标量的导数,我们可以正向求.