Generative Models
约 2577 个字 6 张图片 预计阅读时间 13 分钟
1. Supervised vs Unsupervised Learning
根据学习的数据类型,可以将学习分为监督学习和无监督学习:
- 给定数据 \(x\)、标签 \(y\),学习 \(x\to y\) 映射的过程称为监督学习,如 classification、object detection、image captioning 等;
- 只有数据 \(x\),学习数据的底层结构的过程称为无监督学习,如 clustering、feature learning、density estimation 等.
2. Discriminative vs Generative Models
根据模型学习目标,可以将模型分为判别模型和生成模型:
- 判别模型通常学 \(p(y\mid x)\),如在给定图片 \(x\) 下标签为 \(y\) 的概率分布,最后的概率分布是 label 之间的竞争,其没有处理不合理输入的能力;
- 生成模型直接学 \(p(x)\),即学习输入本身,概率分布是 data 之间的竞争,即训练中出现多的类型的数据概率较大,其拥有“拒绝”不合理输入的能力(给它们分配低概率值);
- 生成模型也可以在给定条件 \(y\) 时学习条件分布 \(p(x\mid y)\),此时一般称为条件生成模型;
这些模型的关系可以用贝叶斯公式表示:
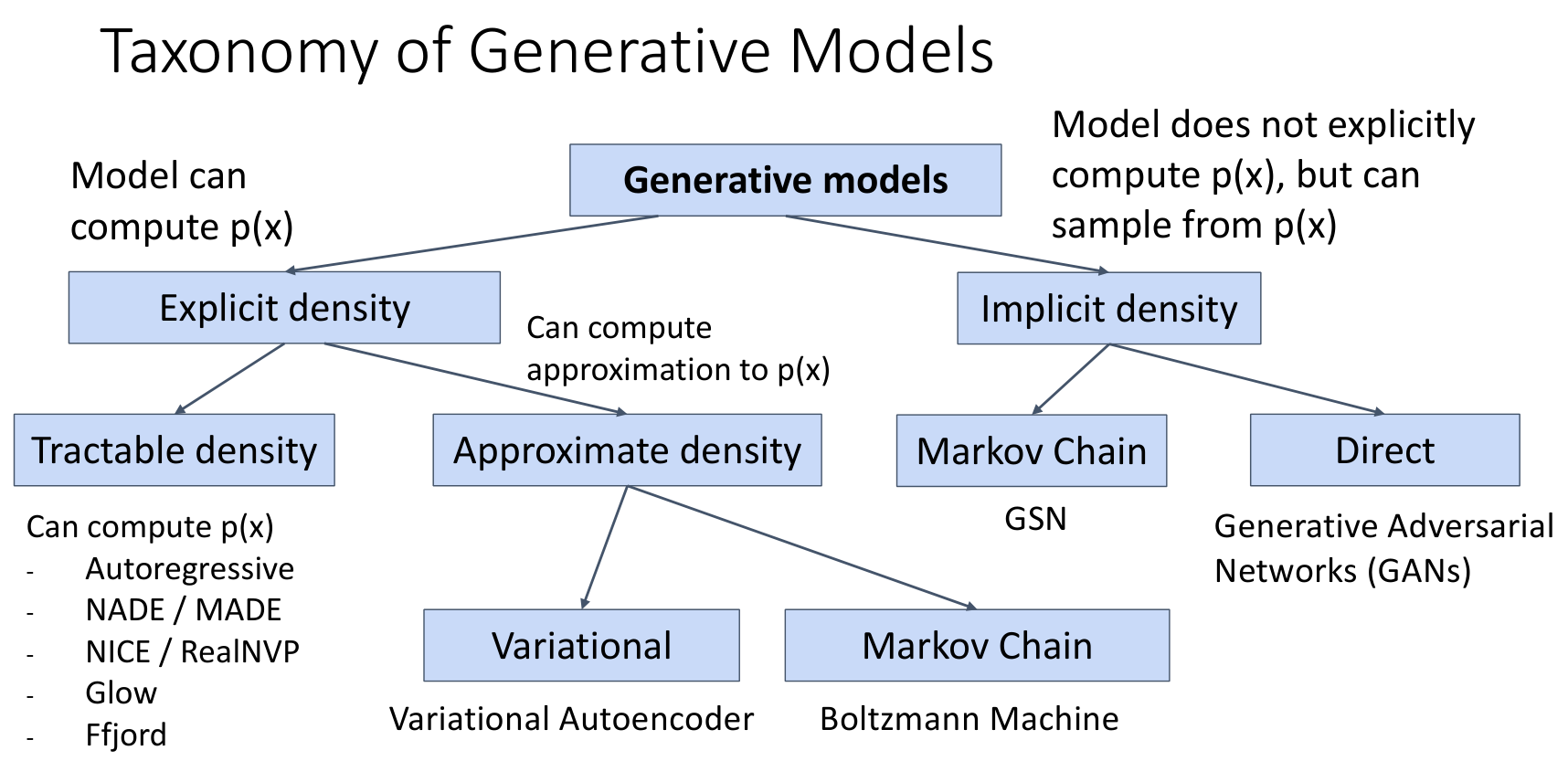
3. Taxonomy
根据生成模型显式 / 隐式刻画概率密度,以及直接计算 / 估计概率密度,可以分为如下类别:
4. Autoregressive Models
4.1 Explicit Density Estimation
显式概率密度:对于输入 \(x\),能有函数 \(f\) 直接计算出该输入的概率,即 \(p(x)=f(x,W)\);那么 \(W\) 就是训练数据的极大似然估计,即 \(W\) 能让所有训练数据概率乘积最大化:
为了防止概率太小无法表示,取对数似然:
自回归生成模型把联合分布按固定顺序分解为一连串条件分布: $$ p(x)=p(x_1,x_2,\dots, x_T) =\prod_{i=1}^{T}p(x_i\mid x_1,\ldots,x_{i-1}) $$
由于有显式概率密度,因此每一项都是可计算的,从而可以实现自回归生成.
对语言而言,现代 llm 基本都输入自回归生成模型;对图像而言,可以按从左到右、从上到下的顺序逐像素建模.生成时每一步只预测下一个像素或通道,因此模型可以给出精确的 likelihood,但采样通常较慢.
4.2 PixelRNN
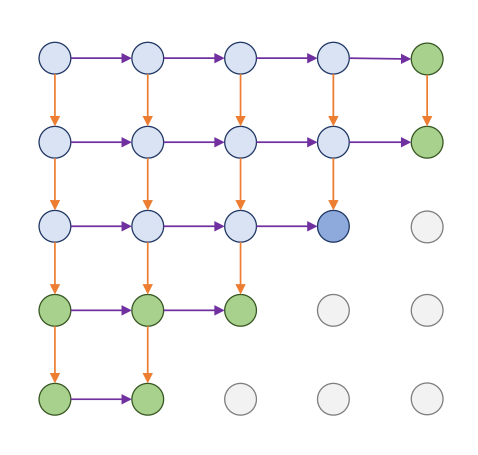
PixelRNN 使用 RNN 按像素顺序建模图像,每个像素的分布依赖于其左上角已经生成的像素,即
它能够捕捉较长距离的依赖,但由于像素之间的生成过程强顺序化,训练和采样都比较慢.
4.3 PixelCNN
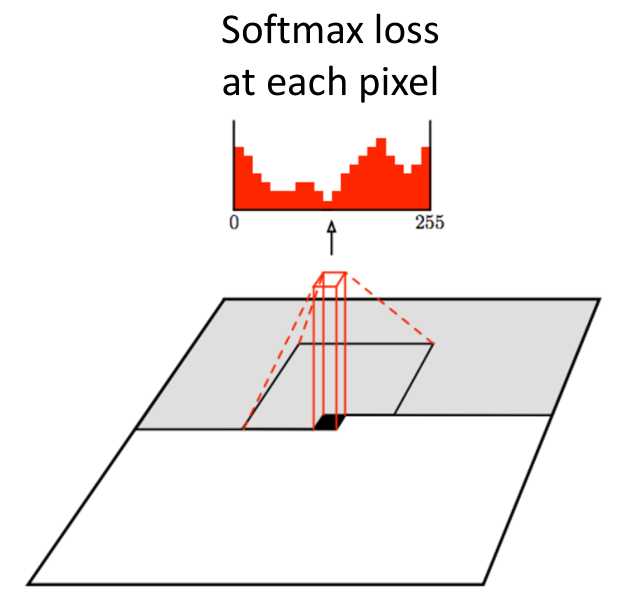
PixelCNN 使用 masked convolution 避免卷积核看到“未来像素”,从而保持自回归因果性.可以通过 256 个 kernel 实现输出 256 个像素,并用 softmax 选出结果;同时叠加多层来实现感受野覆盖之前所有像素.
与 PixelRNN 相比,PixelCNN 的训练更容易并行,但生成时仍然需要逐像素采样.
Masked Convolution
普通卷积会同时看到当前位置周围的像素,其中包含生成顺序上的未来信息.Masked convolution 通过遮住卷积核中的未来位置,使第 \(i\) 个像素只能依赖 \(x_1,\ldots,x_{i-1}\).
5. AutoEncoder
观测数据 \(x\) 只是我们可以直接观测到的样本指标或特征,而在观测数据之下蕴含的还有一些不能直接观测到的、潜在的、未知的特征,这些特征可能对观测数据产生影响,我们称其为隐藏特征.
直接求解或估计 \(p(x)\) 比较困难,考虑引入一个隐变量 \(z\),先生成 \(z\) 再通过某种变换生成最终的 \(x\).
AutoEncoder 的任务:学习两个网络,将输入数据变换成隐变量(encoder),再尽可能将隐变量变换成原始数据(decoder);这样只需在 latent space 采样 \(z\) 送入 decoder 即可生成 \(x\).
有原数据 \(x\) 时,AutoEncoder 能较好的将其压缩成隐变量再恢复;但其 latent space 采样并解码效果很差.(如下图)
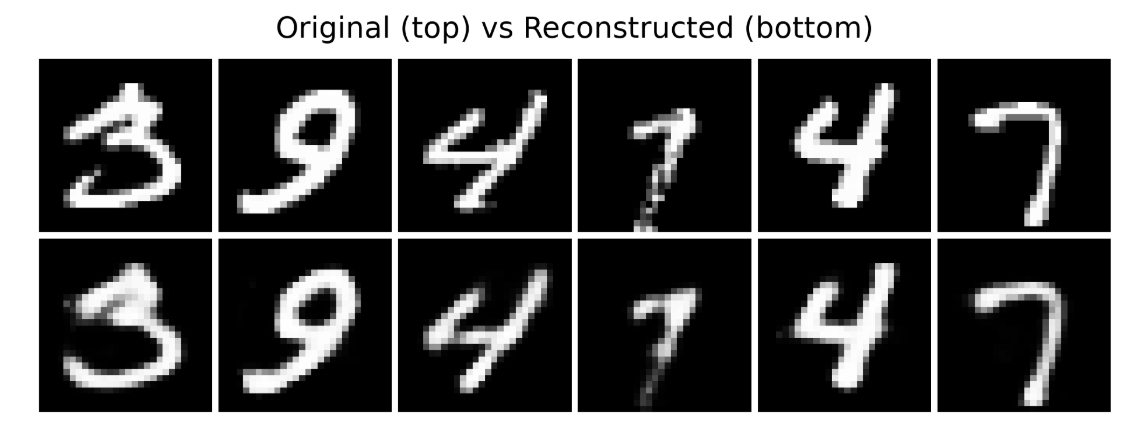
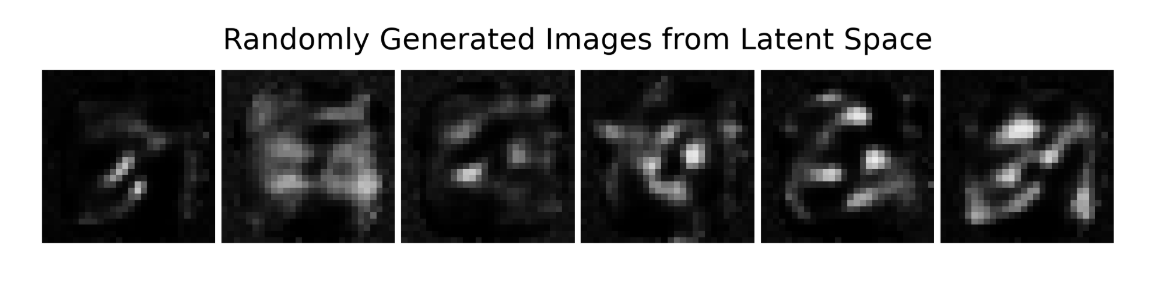
原因是我们没有对 \(z\) 的分布进行约束:训练时得到的隐变量稀疏、不规则,只在特定点能解码成有意义的图像;而随机采样时往往落在训练时未覆盖或很少覆盖的区域.因此普通 AutoEncoder 无法稳定生成新的高质量样本.
6. Variational Autoencoder
根据 AE 的问题,VAE 限定了 \(z\) 的先验分布 \(p(z)\).为了方便采样,我们假设 \(z\) 服从多维标准正态分布,即 \(z \sim p(z)= \mathcal{N}(0,I)\).
接下来我们希望对于给定的 \(x_i\),能够得到后验分布 \(p(z\mid x_i)\).为什么?因为如果其已知,我们就能取样 \(z\) 并输入 decoder 生成 \(\hat{x_i}\),而它是由 \(x_i\) 决定的后验分布决定的,因此 \(\hat{x_i}\) 和 \(x_i\) 做 loss(如 MSE)就可以训练 decoder,从而生成图像.因此问题转化为了寻找后验分布 \(p(z\mid x_i)\).
但我们无法直接求得该分布,因此我们希望求得一个近似分布 \(q_\phi(z\mid x_i)\) 使得这两个分布最近.衡量两个分布距离常用 KL 散度,即最小化:
记 \(\mathbb{E}_{z \sim q_\phi(z|x_i)}\left[\log{p(x_i|z)}\right] - KL(q_\phi(z|x_i) \parallel p(z))\) 为 ELBO,原 KL 散度为 \(KL\),则有
由于变量为 \(z\),因此 \(\log p(x_i)\) 为常数,最小化 \(KL\) 等价于最大化 ELBO.由于
因此目标是最大化前者并最小化后者.
为了最小化后者的 KL 散度,由于 \(p(z)\) 被我们设为标准正态分布,因此我们自然地令 \(q_\phi(z|x_i)\) 服从对角分布 \(\mathcal{N}(\mu_\phi(x),\text{diag}(\sigma_\phi^2(x)))\),这样参数少,并且 KL 散度有闭式解,并且可以使用重参数化技巧训练.
而前者可以理解为给定 \(x_i\) 后从 \(z\) 的后验分布 \(q_\phi(z|x_i)\) 采样得到隐变量 \(z\),相当于把 \(x_i\) 编码成了 \(z\),对应 encode;而 \(p(x_i\mid z)\) 表示给定 \(z\) 又生成回 \(x_i\) 的概率,反映的是把 \(z\) 解码为 \(x_i\) 的过程;因此可以把该期望理解为对于给定 \(x_i\) ,将其按分布 \(q_\phi(z|x_i)\) 编码为某个 \(z\) 后能再成功解码(重构)回 \(x_i\) 的对数似然函数值的期望.如果这个期望足够大,说明得到的 \(z\) 是一个能有效反映 \(x\) 的隐变量.
在实际训练中,通常写成最小化损失,所以取符号,即
- 第一项为重构误差,让网络尽量准确的还原出来输入 \(x\).推导公式可以得到减小其误差可以转化为减小 \(x_i\) 和 \(\hat{x_i}\) 的 MSE;
- 第二项为 KL 散度,让样本整体贴近正态分布.将两个正态分布带入 KL 散度公式,可以计算得到损失为 \(\dfrac{1}{2}(-\ln \sigma^2 + \sigma^2 + \mu^2 - 1)\)(一维情况).
将损失扩展到 \(d\) 维、\(n\) 样本:
有了损失的表达式,只需要让所有计算过程可导,模型就能根据反向传播训练了.为了让采样过程可以反向传播,VAE 使用重参数化技巧,即不直接在 \(q_\phi(z|x_i)\) 采样(不可导),而是在标准正态分布采样后转化为 \(q_\phi(z|x_i)\) 对应的正态分布:
最后得到 VAE 的 latent space 插值可以得到平滑的图像变化,形成了一个连续的语义空间.其缺点是样本可能偏模糊.

7. Generative Adversarial Network
GAN 由 Generator 和 Discriminator 组成.Generator 将随机噪声 \(z\) 映射为样本 \(G(z)\),Discriminator 判断输入来自真实数据还是生成模型.二者构成一个 minimax:
判别器 \(D\) 的目标是让 \(D(x)=1\)(真实模型),\(D(G(z))=0\),即最大化 \(V(D,G)\);而生成器 \(G\) 想在最优判别器的情况下最小化这个目标,即希望生成样本被判定为真的,即 \(D(G(z))=1\).
经过数学推导可以得到,最优判别器为
即最优判别器本质上在估计真实分布和生成分布的密度比.
当 \(D\) 为最优判别器时,推导得到 GAN 的最优解当且仅当
此时 \(D^*=\dfrac{1}{2}\),此时生成器生成的分布和真实数据分布完全一致,判别器分不出真假,只能随机猜.
训练时,由于初始时 \(\log(1-D(G(z)))\) 接近 0,会导致梯度消失问题;因此实际中常用 \(-\log D(G(z))\),其和原始 loss 有相同的最优点,但初期梯度更强.
GAN 通常能生成更清晰的样本,但容易出现 mode collapse、评价困难等问题.