Regularization and Optimization
约 1560 个字 4 行代码 4 张图片 预计阅读时间 8 分钟
正则化关注如何控制模型复杂度,优化算法关注如何更新参数.两者共同决定模型能否稳定训练并获得较好的泛化能力.
1. Regularization
一个模型在训练数据表现得很好而在未知数据表现得很差,这种现象称为过拟合.
为了防止模型出现过拟合,在数据集的损失函数后加上一个正则化项,其一般是关于模型复杂度的单调递增函数.
- \(\lambda\) 是衡量惩罚力度的超参数.
- \(R(W)\) 是正则化项.其可以为L1正则化 \(\|W\|\) 或L2正则化 \(\|W\|^2\).
2. Optimization
我们已经用损失函数量化了参数的好坏,现在我们希望找到使 \(L(W)\) 最小的 \(W^{*}\).
优化中常用的方法为 Gradient Descent(梯度下降),即求出损失函数 \(L\) 关于 \(W\) 每一个参数的导数(即梯度,实际上是通过计算),将 \(W\) 的每个参数往负梯度方向进行变化.用代码来说就是
1 2 3 4 | |
其中的超参数包含:
- 权重初始化方法
- 执行步数
- 学习率(即每一次走的步长)
不妨设目前的参数为 \(\theta\)(更常用),梯度为 \(g_t=\nabla_\theta L(\theta_t)\),学习率为 \(\alpha\),则最朴素的更新为
所有后文中介绍的基于梯度下降的优化方法都在解决两个问题:
- 每一次更新方向用什么量代替原始梯度 \(g_{t}\)
- 每一次走多大步
2.1 Batch Gradient Descent
每一次都用所有数据计算损失与梯度.
然后更新 \(\theta_{t+1}=\theta_t-\alpha \nabla L(\theta_t)\).
优点是无采样噪声,缺点是每一步计算代价太高,且容易卡在鞍点处.
2.2 Stochastic Gradient Descent
随机梯度下降用部分数据来近似全数据期望,即
然后更新
由于是取部分数据,因此梯度会有噪声;好处是计算代价低,且由于每次选取的是不同的数据,不容易卡在鞍点处.
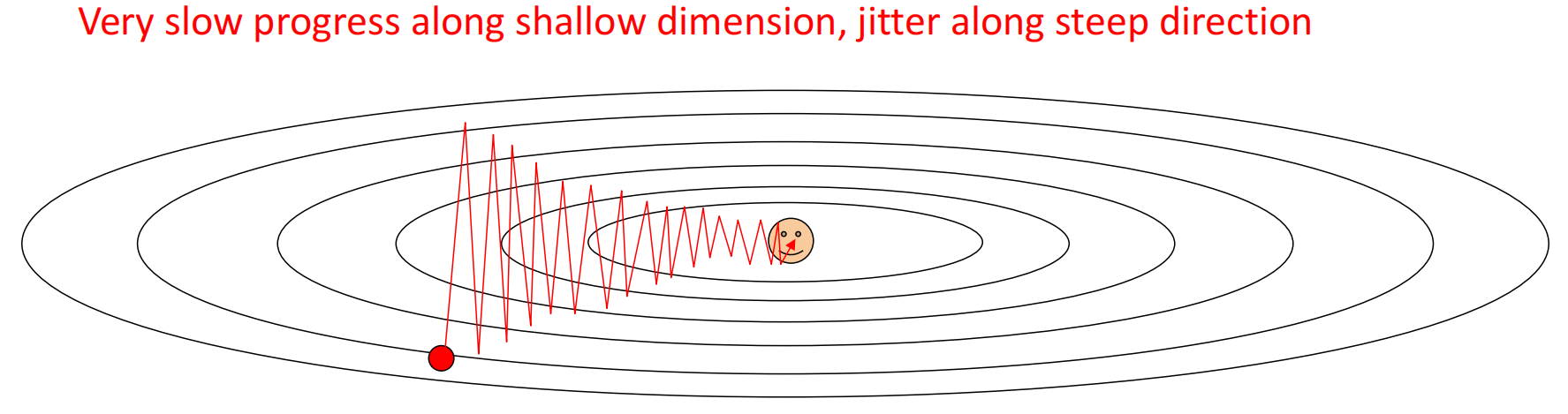
BGD和SGD有个共性的缺点:在某些方向变化太快、某些方向变化太慢时路径会抖动,例如
2.3 Momentum
为了解决路径抖动的问题,我们考虑使用历史梯度的加权平均数.更新的梯度的权重应该更大,而更旧的应该更小.
即
\(m_{t}\) 即为梯度的一阶指数加权平均.将 \(m_{t}\) 展开,得到
\(m_{0}\) 常被初始化为0,因此 \(m_{t}=(1-\beta)\sum_{i=1}^{t}\beta^{t-i}\theta_i\).即为EMA(指数加权平均).
其优点为:
- 降噪:由于SGD带有降噪,而EMA因为取平均值,可以平滑这些噪音.
- 抑制抖动:如果某个方向来回震荡,正负梯度会在平均中部分抵消.
2.4 Nesterov Momentum
Momentun有可能在接近最小值点时冲过头,这样还需要更多的步骤才能到达最小值.而Nesterov Momentum的思路是在Momentum的基础上,不在当前点 \(\theta_{t}\) 计算梯度,而是在走一步后到达的位置计算:
其相较于Momentum,加了一层前瞻修正.
2.5 AdaGrad
AdaGrad用于解决学习率调节的问题,其也被称为自适应学习率算法.定义梯度的二阶累积量 \(v_t=v_{t-1}+g_t^2\)(此处为张量的逐元素平方),更新:
其实 \(\epsilon\) 是一个极小的正数,用于防止除以0.
当梯度一直很大时,\(v_{t}\) 就会很大,此时就会自动调小学习率,即减小步长;反之如果梯度一直很小,其步长就会较大.
不过由于 \(v_{t}\) 是只增不减的,最后学习率可能衰减的太厉害.因此就出现了RMSProp.
2.6 RMSProp
RMSProp在AdaGrad基础上,将 \(v_{t}\) 从累计平方和改为了 \(g_{t}^{2}\) 的EMA:
这样的好处是学习率会自适应最近的梯度大小.如果最近的梯度大小很大,那么学习率就会较小;反之最近的梯度较小,那么学习率就会变大.
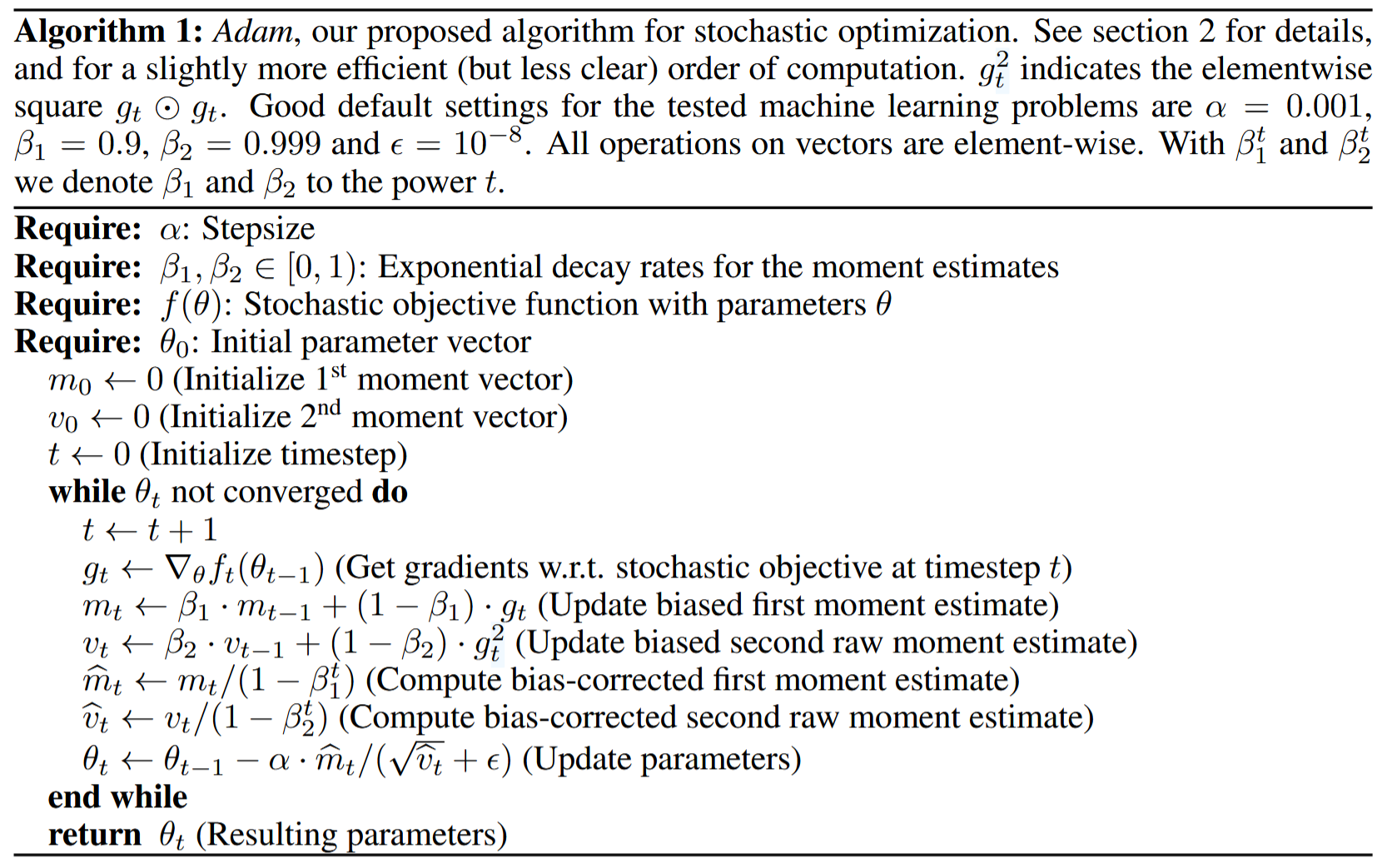
2.7 Adam
Adam: A Method for Stochastic Optimization 是被广泛使用的梯度下降算法,其将Momentum与RMSProp进行了结合,并加以修正.
不妨设此时
观察到它们的权重和为 \((1-\beta)\sum_{i=1}^{t}\beta^{t-i}=1-\beta^{t}\),其权重和小于1,在前几轮时得到的平均数会偏小,因此需要除以 \(1-\beta^{t}\) 对数据进行偏置矫正:
然后更新:
2.8 AdamW
AdamW 是 Adam+Weight Decay 的优化.
Weight Decay
Weight Decay是在 \(g_{t}\) 里额外加上 \(2\lambda \theta_{t}\) 的惩罚项.这里与L2正则化做一个简单的对比:
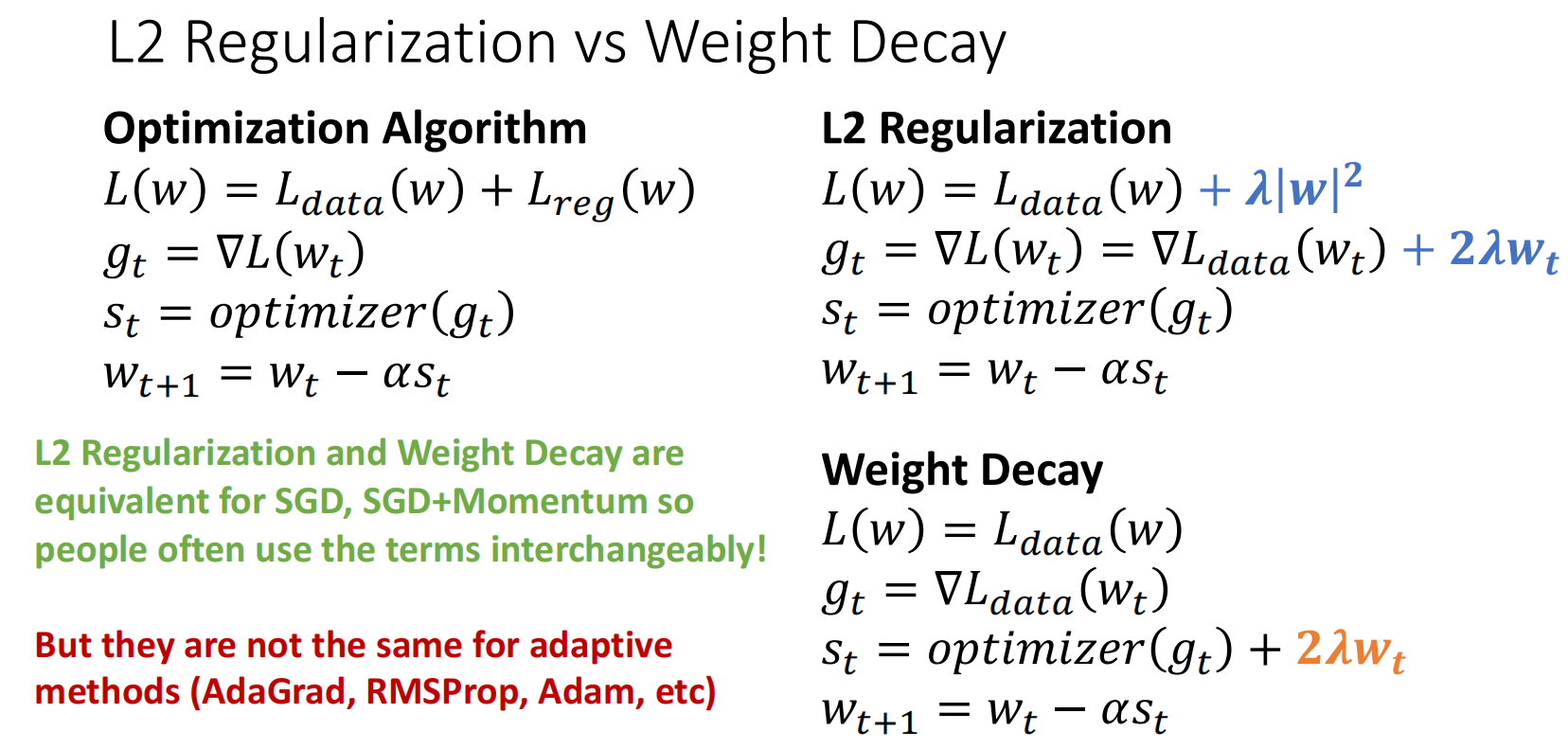
L2正则化是在损失函数中添加 \(\lambda \theta_{t}^{2}\) 的惩罚;而Weight Decay是在更新量中额外加上 \(2\lambda \theta_{t}\).在SGD/SGC+Momentum中,二者结果是一样的;而在Adam这类自适应优化器中,由于对学习率做了自适应,结果会不同.也就是说,我们使用Weight Decay而不是L2正则化,是因为我们不希望惩罚项被自适应机制一起处理.
在 Adam 中,L2 正则化与 Weight decay 的区别:
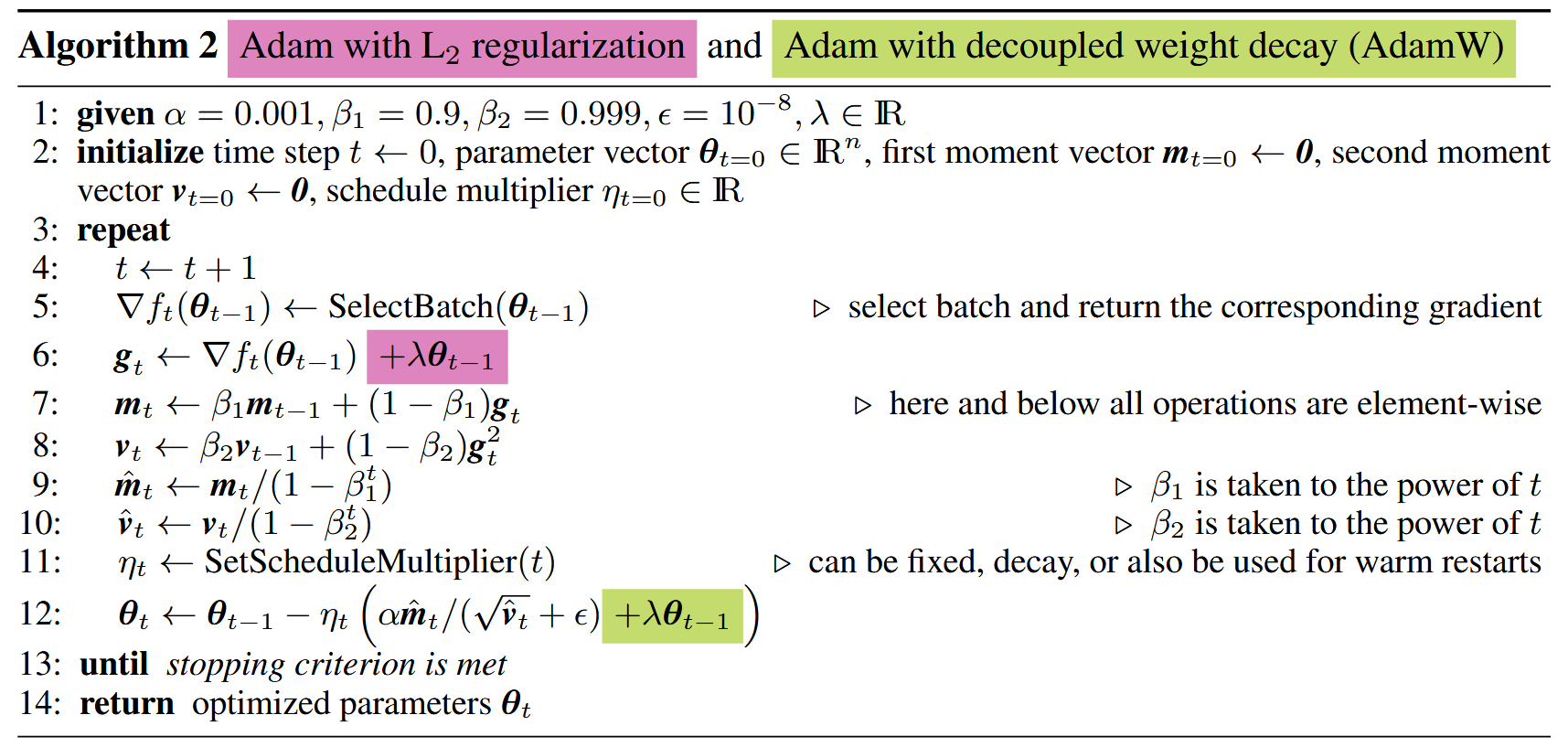
AdamW在Adam的基础上添加了防止过拟合的参数,因此可以将其当作默认优化方法.