Convolutional Neural Networks
约 1432 个字 10 张图片 预计阅读时间 7 分钟
卷积神经网络利用局部连接、权重共享和空间下采样来处理图像数据。本节记录卷积层、池化层、归一化和 LeNet 等基础结构。
多层感知机难以学习在图像不同区域的类别.为了实现特征提取功能,提出了卷积神经网络.
1. Convolution Layer
1.1 Filter
对于一张黑白图片,其只有两个参数:高度为 \(H\)、宽度为 \(W\)(大多数情况下 \(H=W\),后文统一只写 \(W\)),可被转化为二维张量.此时有一个 \(K\times K\) 的kernel(卷积核)从图片上滑过,每次都与原图对应位置的像素值做内积,这样得到一张新的图片,称为avtivation map(激活图),其边长为 \(W-K+1\).
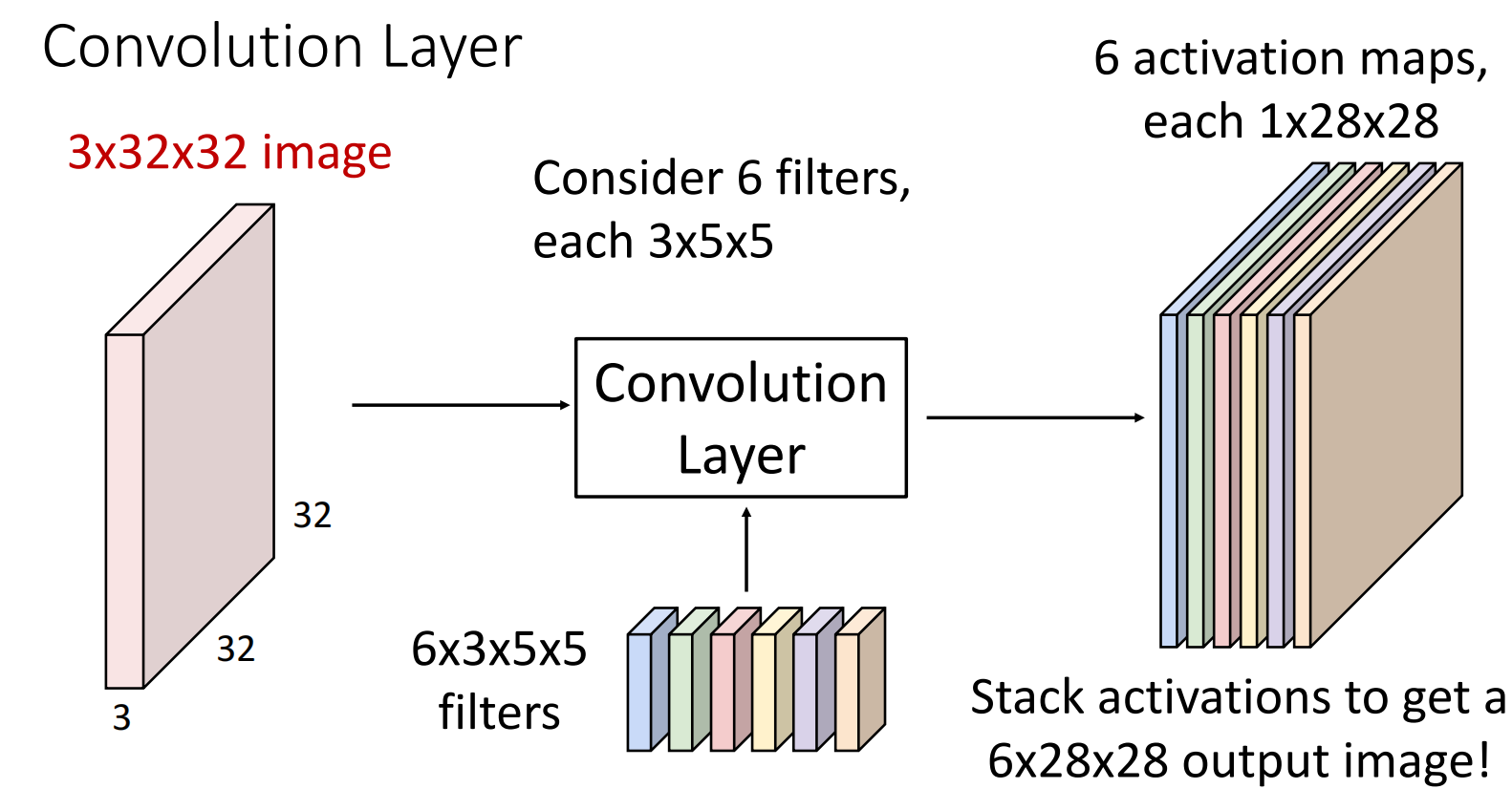
对于一张彩色图片,其有高度、宽度、channel(通道,如RGB)三个参数,会被转化为三维张量.与多通道层进行运算时,卷积核也必须相同的通道数;例如 \(3\times 32\times 32\) 的图像,其可以与 \(3 \times 5\times 5\) 的卷积核做卷积操作.卷积核的每一个通道与图像的每一个通道一一对应,结果相加.黑白图像可以认为是单通道的.
经上述卷积核操作后得到的结果均为单通道的.为了得到多通道,可以叠加卷积核,每一个卷积核对应一个结果的通道,得到filter(滤波器).如果有 \(N\) 个通道数为 \(C_{\text{in}}\) 的图片,经过 \(C_{\text{out}}\) 个 \(C_{\text{in}}\) 通道数的卷积核处理后,会得到 \(N\) 个通道数为 \(C_{\text{out}}\) 的图片.用张量描述即为:
激活函数
卷积操作本质上仍然是仿射变换,因此叠加多个卷积层等效于只是用一个卷积层,所以要在卷积层之间加激活函数.
1.2 Padding
如果kernel不是 \(1\times 1\) 的,得到的激活图会比原图小,因此可以给原图加上padding(填充)后进行卷积操作.常用的是zero padding,即边缘补0.假设添加的边缘宽度为 \(P\),则得到的输出宽度为 \(W-K+1-2P\),一般取 \(P=(K-1)/2\) 使得卷积操作后图像大小不变.
1.3 Stride
经过了数个卷积层后,单个像素可以认为是一个正方形的区域的综合,这个区域被称为Receptive Fields(感受野).显然卷积层越多、\(K\) 越大,感受野越大.如果图像过大而 \(K\) 较小,需要很多卷积层才能让感受野为整张图片.
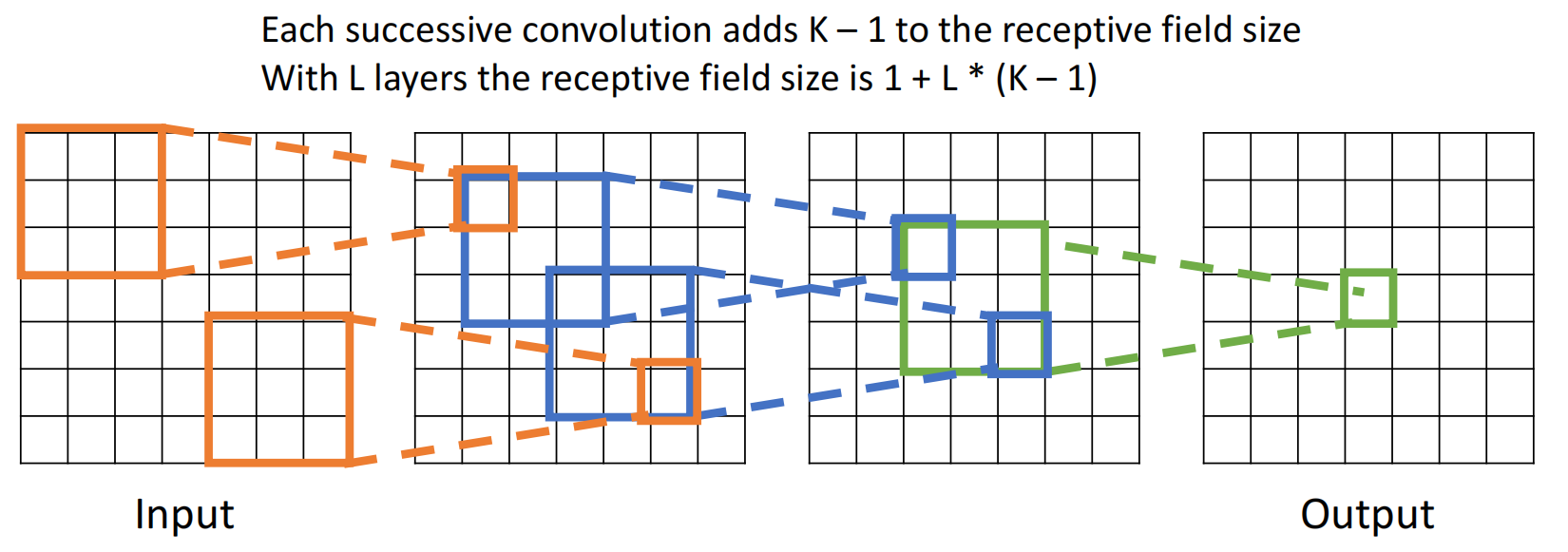
因此引入stride(步长)的概念:每次kernel滑动可以不止滑动一个单位,可以是多个.例如 \(7\times 7\) 的图像,经过 stride=2、Filter=3*3 的卷积后得到的是 \(3\times 3\) 的图像.此时再做一次卷积操作,得到的 \(1\times 1\) 像素的感受野就是全图.
此时输出的宽度公式为 \((W-K+2P)/S + 1\).
1.4 \(1\times 1\) Conv
使用 \(1\times 1\) 卷积,即使不加padding也不会使图像变小.其可以看作是单个像素在每个通道的加权平均数,也可以输出多个通道,相当于对单个点的所有通道做感知机操作.
1.5 Conv in PyTorch
卷积也有一维卷积与三维卷积,这里我们用的更多的是二维卷积。PyTorch 有内置的 Conv2d,可用于 nn.Sequential 叠加网络层。
2. Pooling Layers
Downsampling(下采样)是一种让图像的空间尺寸变小的操作.积层也能实现下采样,但我们一般使用pooling layer(池化层),因为其不学习新参数,池化层的作用效果只有三个超参数决定:
- Kernel Size
- Stride
- Pooling function(max/avg)
Example
对一个 \(4\times 4\) 的图像进行 kernel size=2, stride=2, pooling function=max 的最大采样结果:
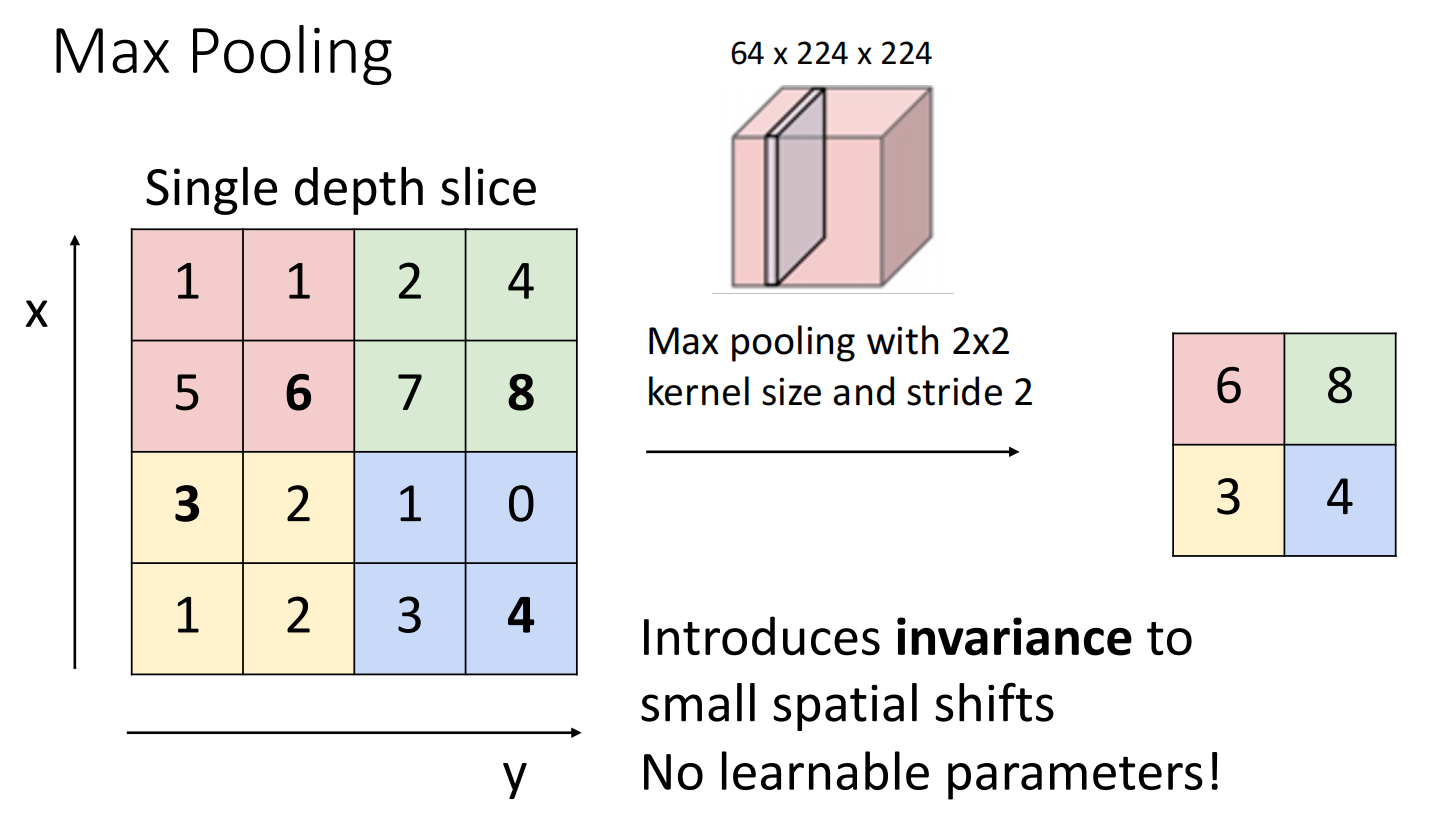
常用的max函数由于带有非线性性,因此池化层后一般不用接激活函数.
此时我们可以构建简单的卷积神经网络,用卷积层、ReLU、池化层以及全连接层:如 LeNet-5:
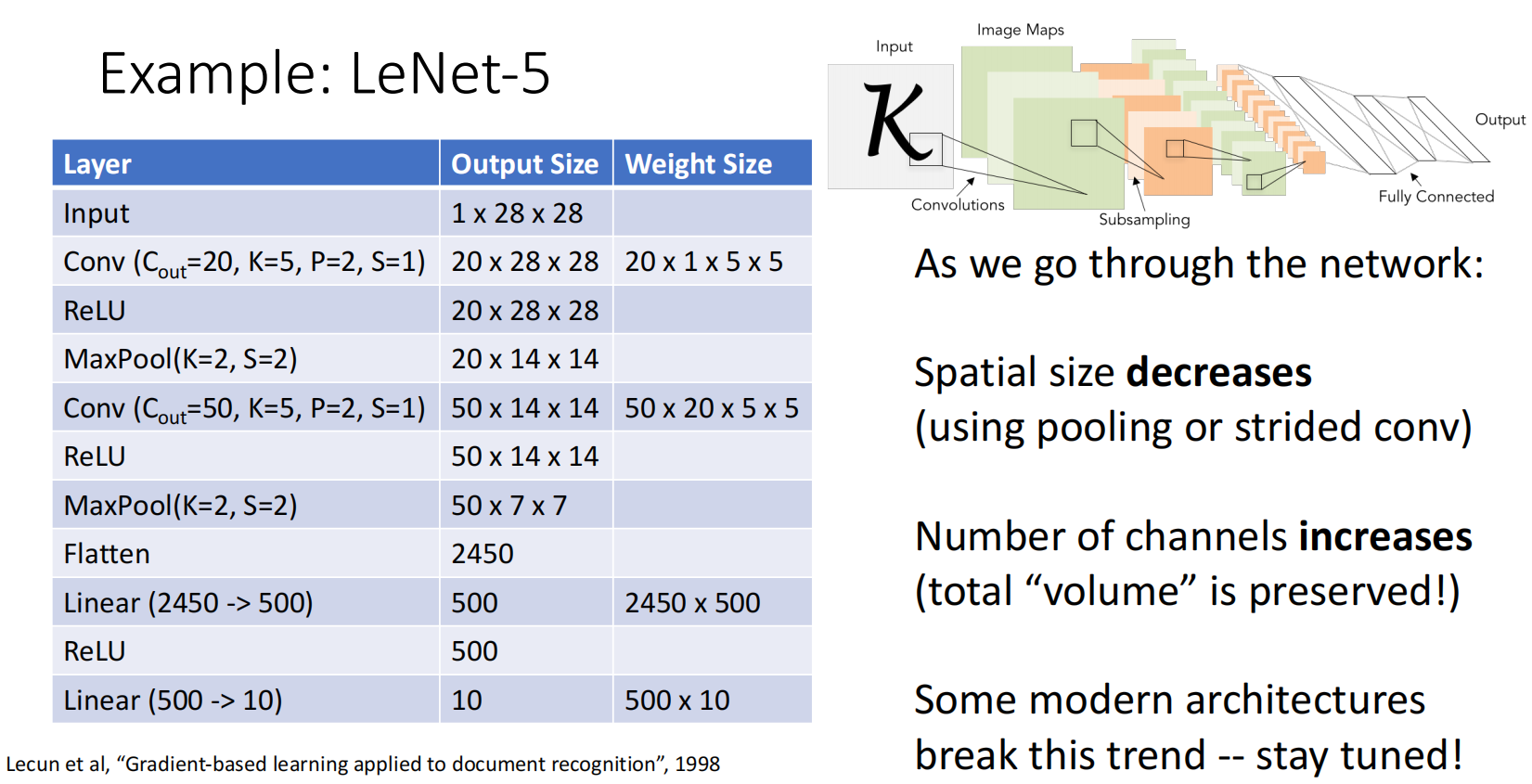
可以发现我们偏向于减小图像尺寸而增加通道数.
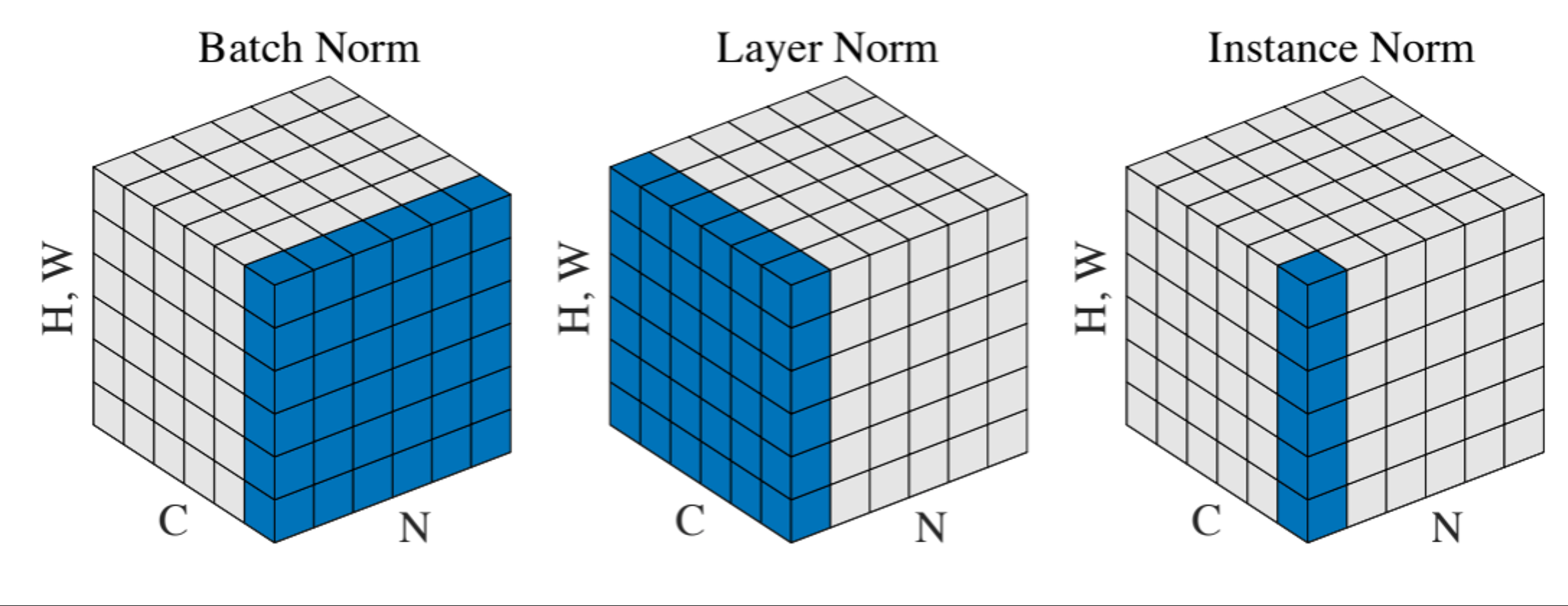
3. Normalization
经过几层网络后,数据的尺度可能差距会很大,这对于学习率的调节不方便.因此,引入Normalization(归一化)将数据拉回均值接近0、方差接近1的正常范围.
3.1 Batch Norm
BatchNorm(批归一化)是逐特征/通道求平均,常用于处理图像.例如单一输入 \(x\in \mathbb{R}^{N\times D}\),其中 \(N\) 为batch size,\(D\) 为特征数量,则
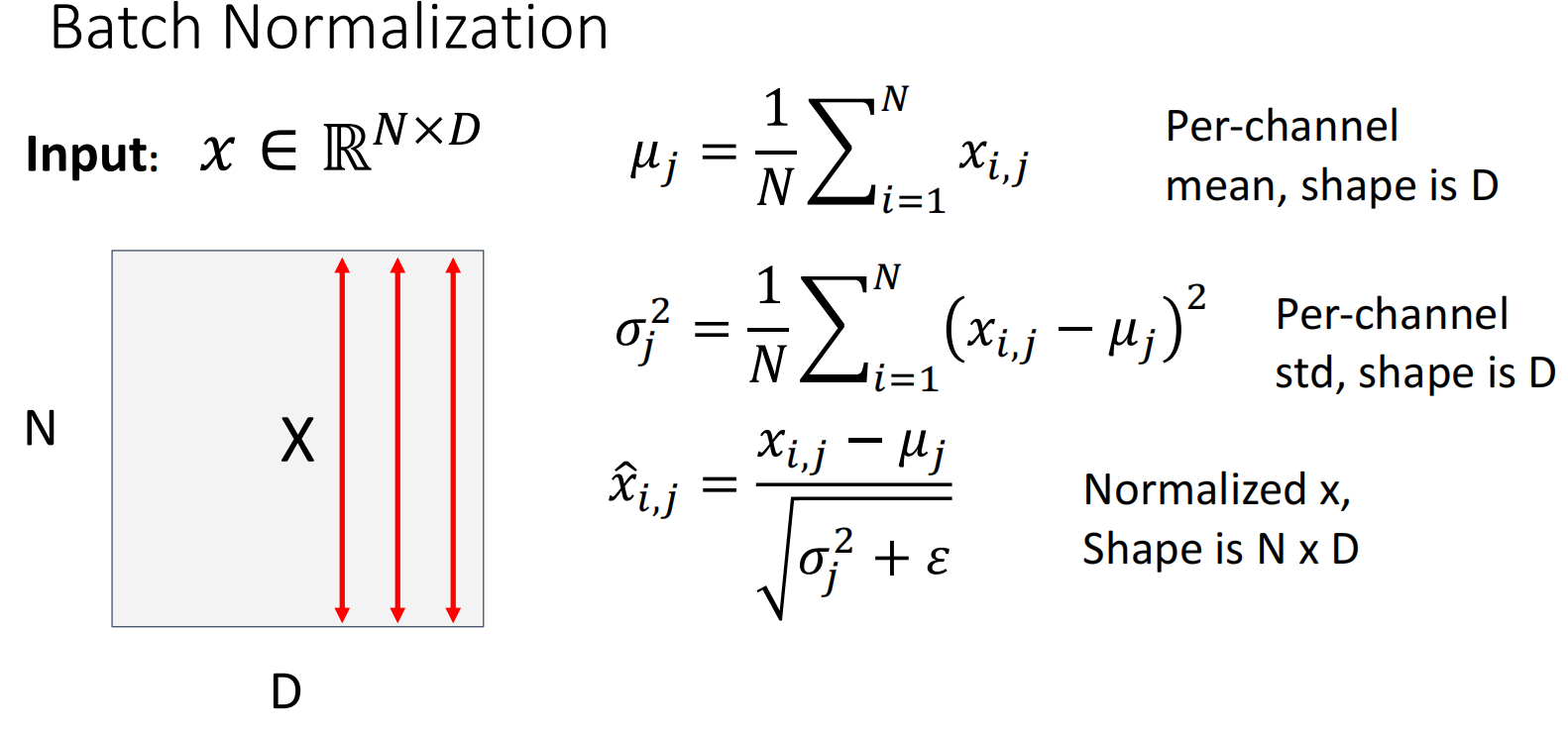
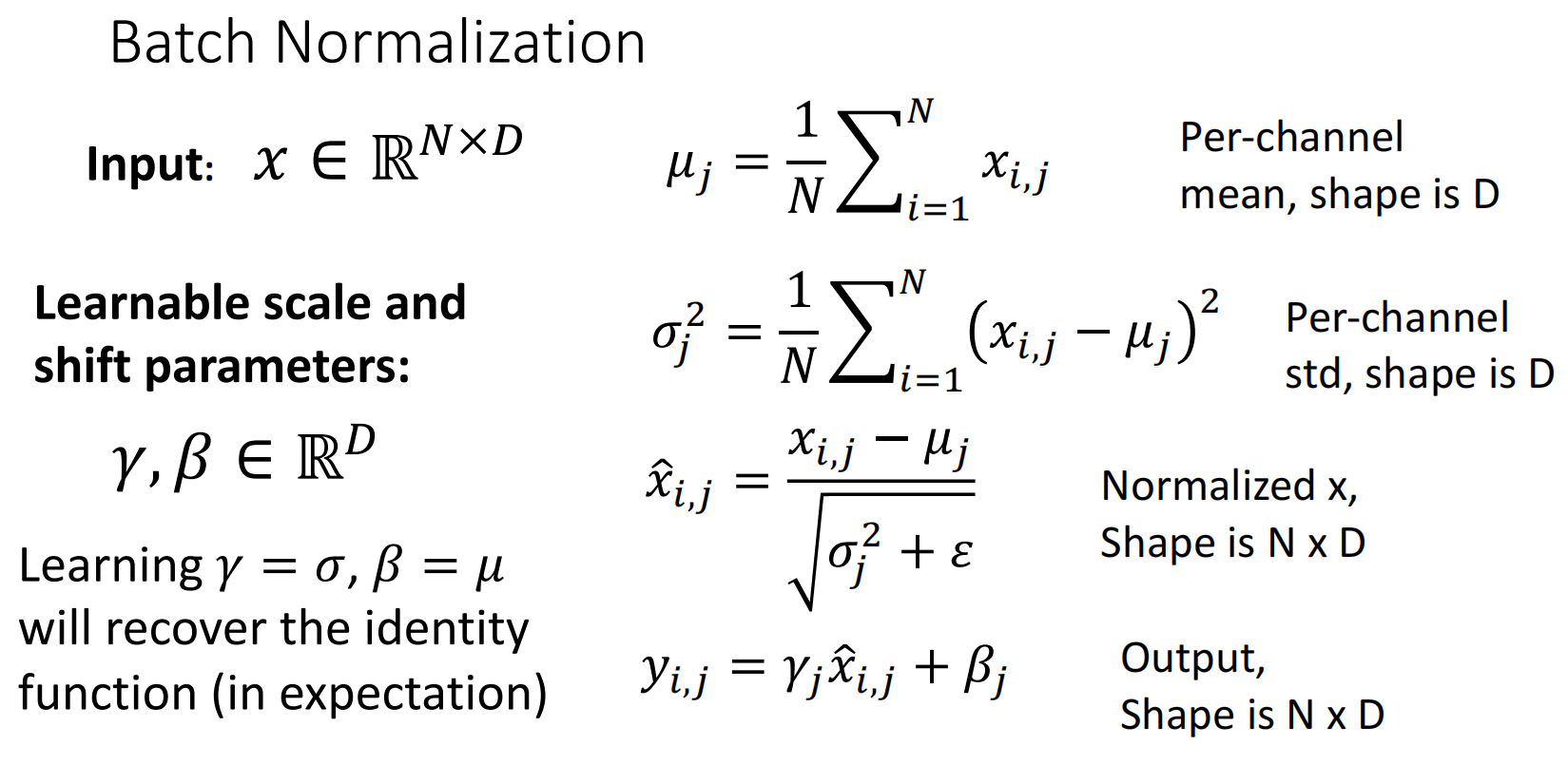
加入了一个微小量 \(\epsilon\) 防止除以0.为了增强模型的表达能力,BatchNorm后也可以再进行仿射变换,得到更适合的调节.其中 \(\gamma,\beta\) 都是可学习参数.
由于测试集的batch size较小,得到的 \(\mu,\sigma\) 没有代表性,因此测试时一般使用训练集得到的整体running average \(\mu,\sigma\).同时因为使用的确定的 \(\mu,\sigma,\gamma,\beta\) 值,BatchNorm在此时是一个线性运算,可以和卷积层放在一起,因此在测试时BatchNorm几乎是零开销的.
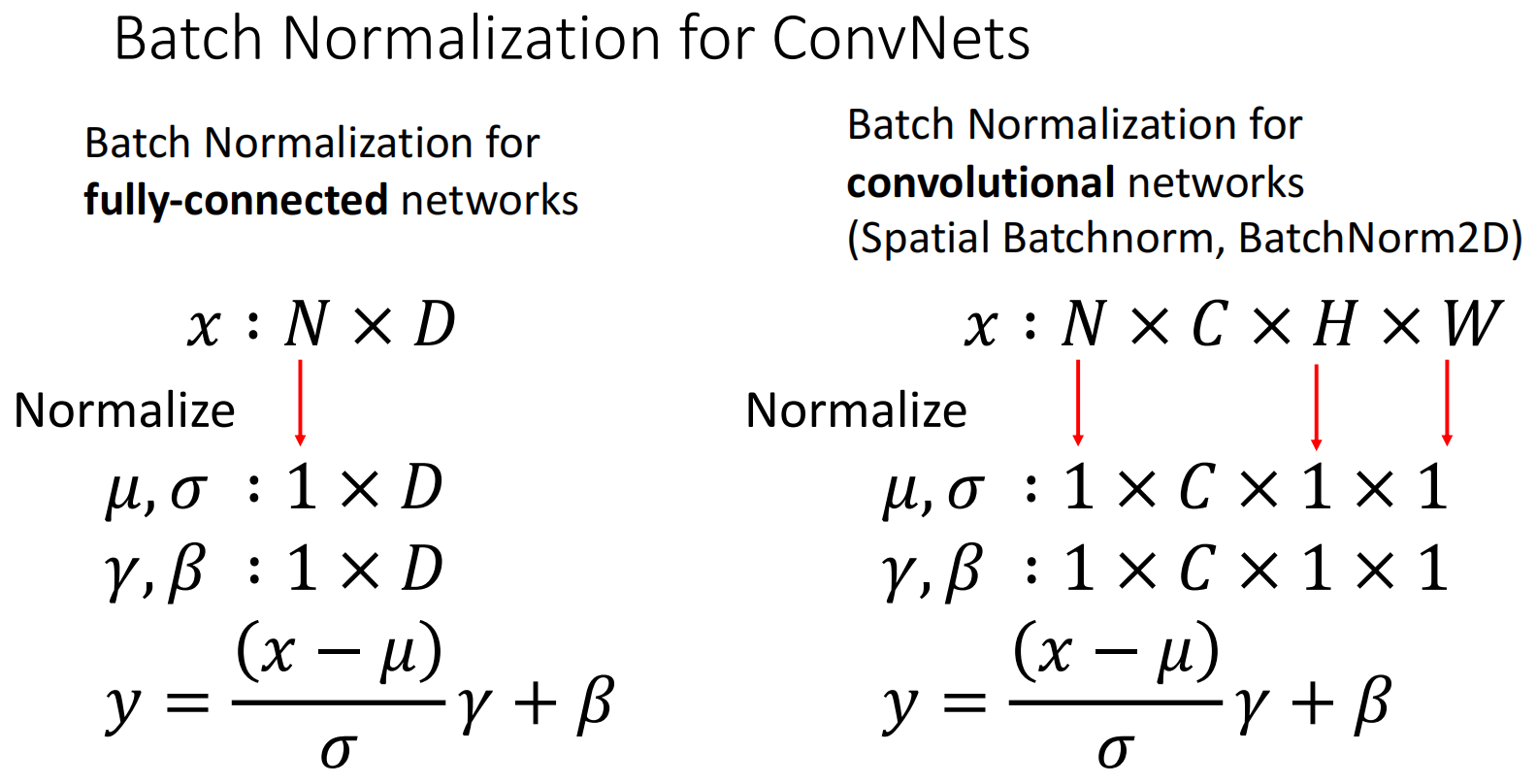
对于CNN:为每一个通道的平均
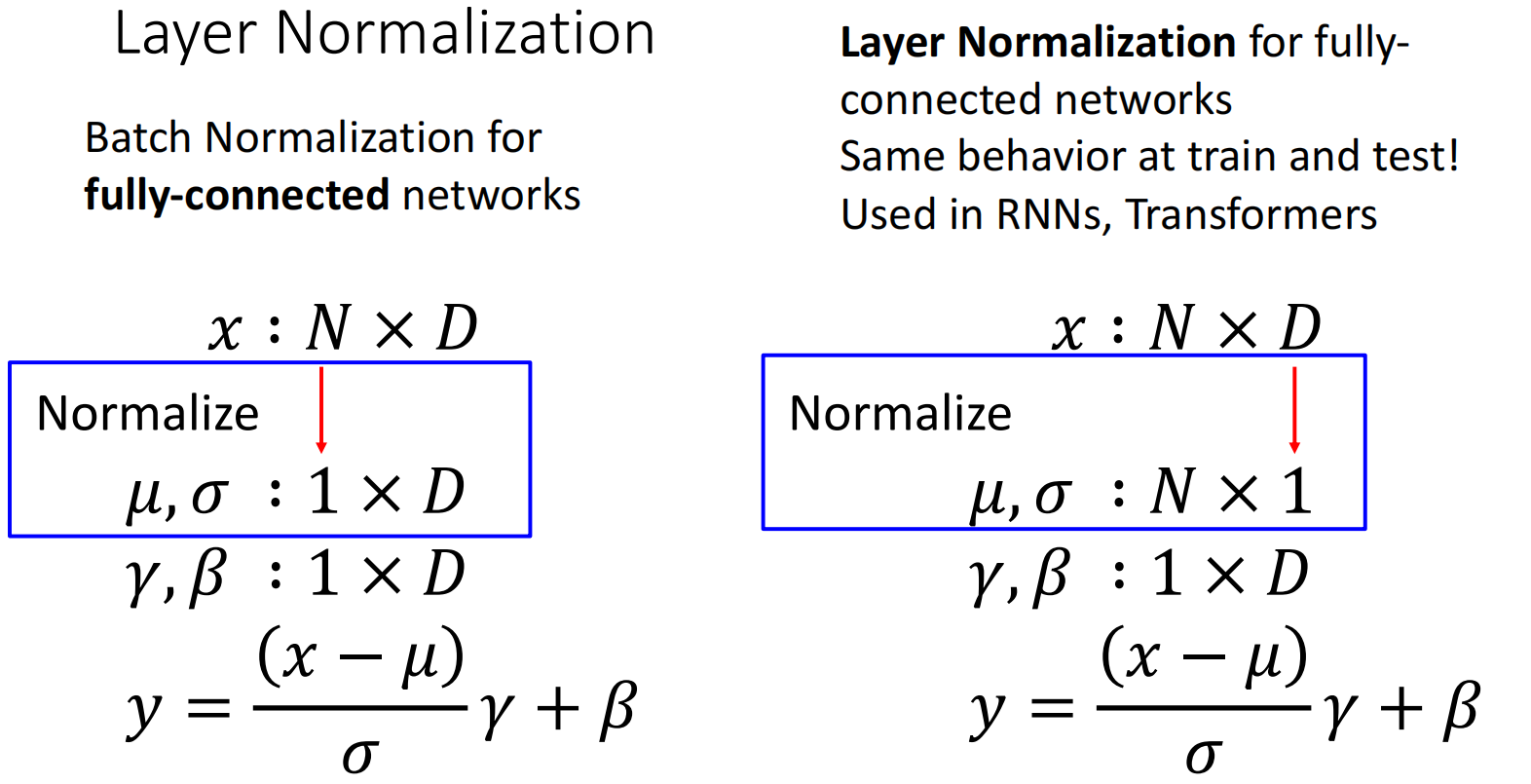
3.2 Layer Norm
LayerNorm(层归一化)是对单一数据的不同特征取平均,因此其在测试时的取平均方式与训练时一样,不需要用running average.常用于GPT等处理文本的任务.
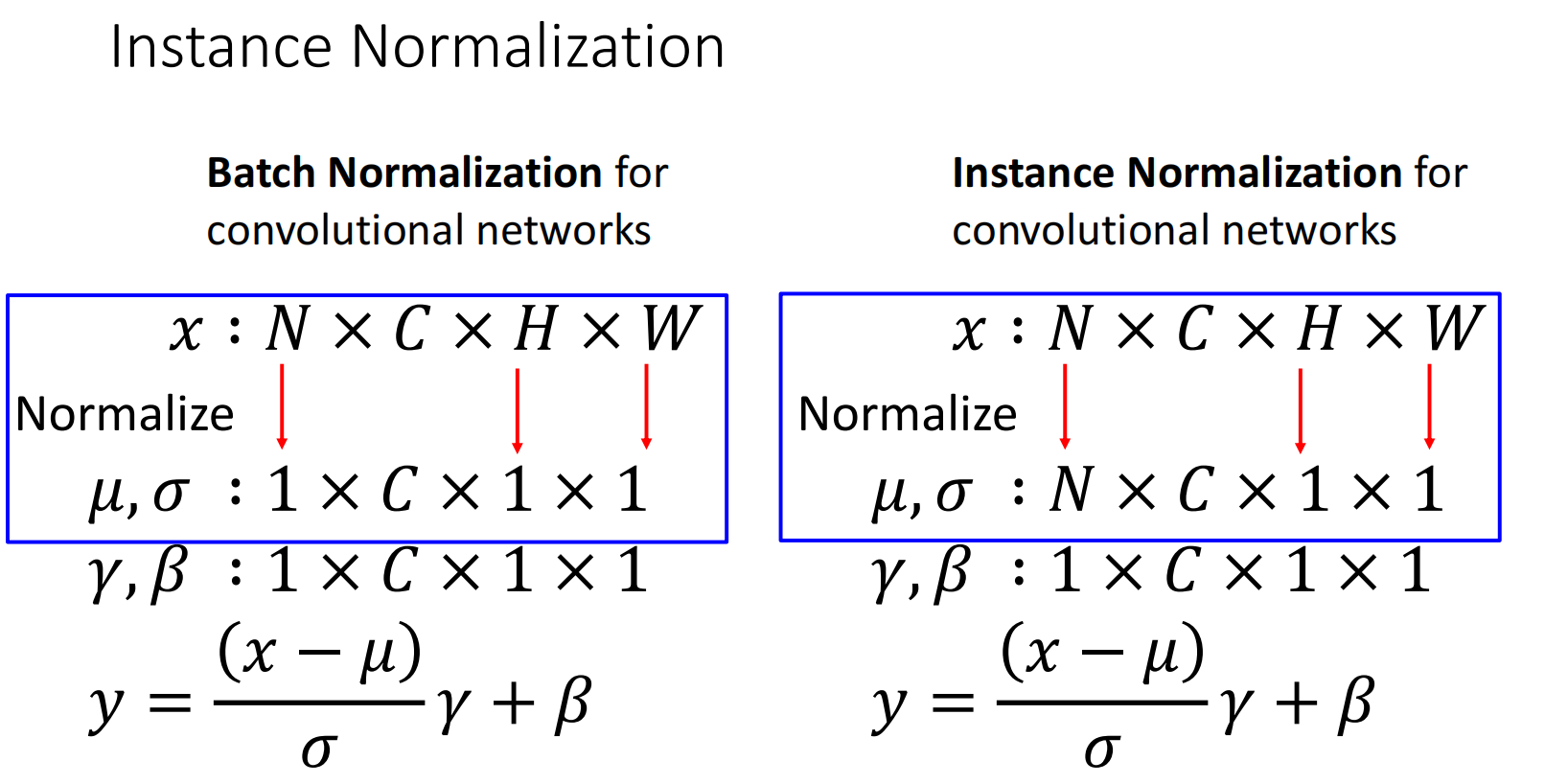
3.3 Instance Norm
Instance Norm是对单一数据的每一个通道求平均.
不同Norm方法区别