Classification and Linear Models
约 1923 个字 6 行代码 6 张图片 预计阅读时间 10 分钟
分类是机器学习中最常见的监督学习任务之一.本节从最近邻分类器过渡到线性分类器,为后续神经网络中的 score function、loss function 和超参数选择打基础.
计算机与人类视觉的Semantic Gap:计算机看图片是一个数表,于人类而言简单的视角转换对计算机都是极大的挑战.除此之外,Interclass variation(类内变化)、Fine-Grained Categories(颗粒度分类)、Background Clutter(背景干扰)、Illumination Changes(光影改变)、Deformation(变形)、Occlusion(遮挡)等也是棘手的问题.
使用机器学习方法实现计算机视觉:
- 训练(图像+标签)得到模型
- 预测(模型+图像)得到标签
1 2 3 4 5 6 | |
Datasets(训练集)提供训练图像及对应标签,下面是一些常见的训练集:
- MNIST:含10个种类(0~9的手写数字),每张图片为28*28黑白像素
- CIFAR10:含10个种类,每张图片为32*32RGB像素
- CIFAR100:CIFAR10升级版,含100种类
- ImageNet:含1000种类,约1.3M training image、50K validation images、100K test images
1. Nearest Neighbor Classifier
1.1 Norm
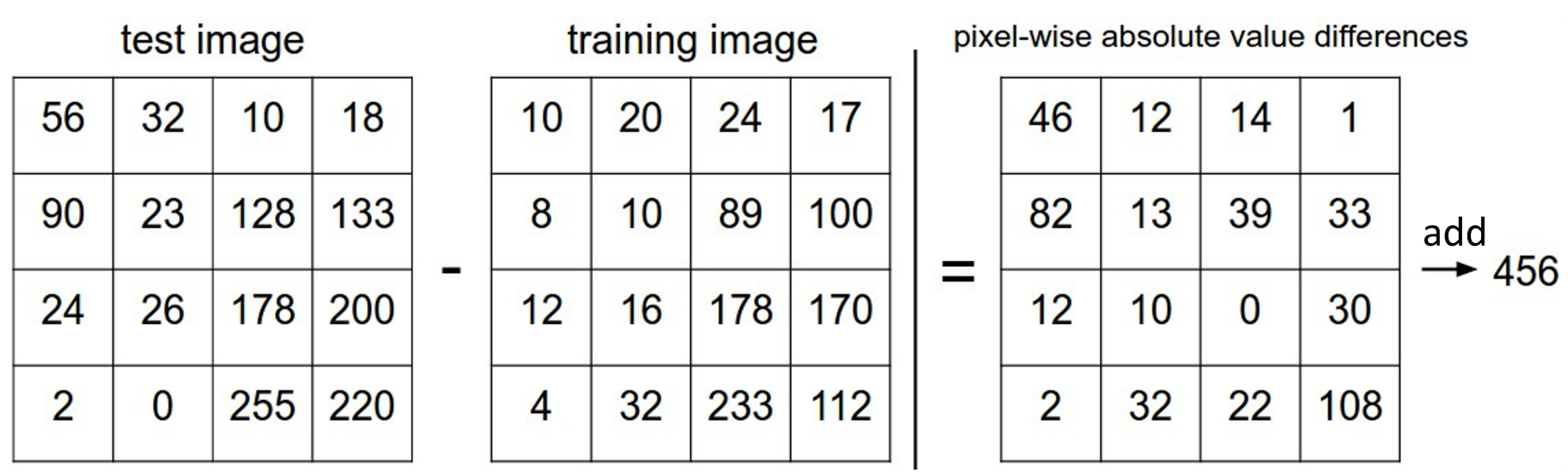
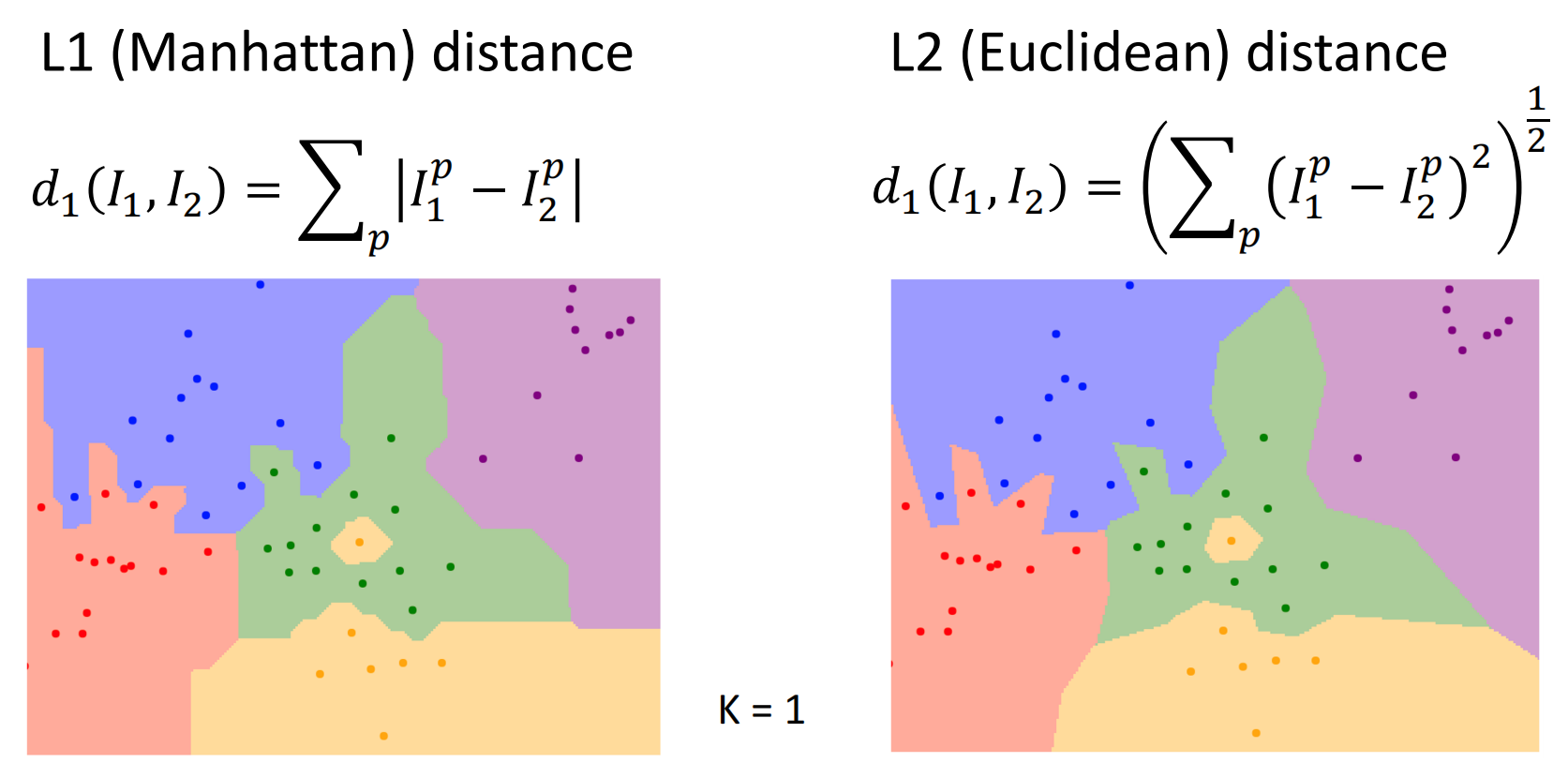
L1 distance(L1范数、曼哈顿距离):两个对象对应位置元素差值的绝对值之和,\(d_(I_1,I_2)=\sum_p|I_1^p-I_2^p|\)(\(p\) 表示单个像素).
L2范数/欧几里得距离:常见的距离, \(d(I_1,I_2)=\left(\sum_p(I_1^p-I_2^p)^2\right)^\frac{1}{2}\).
1.2 Nearest Neighbor
Nearest Neighbor(最近邻法)将所有训练图片与标签存下来;对于测试样本,与训练样本逐一比对找到距离最小的样本的标签.训练一张图片是 \(O(1)\) 的,预测是 \(O(n)\) 的.
最近邻法不适合高维的分类(如整体图像识别),因为所需要的训练集随着维度升高呈指数级增长.不过配合ConvNet后,其在特征检索方面表现良好.
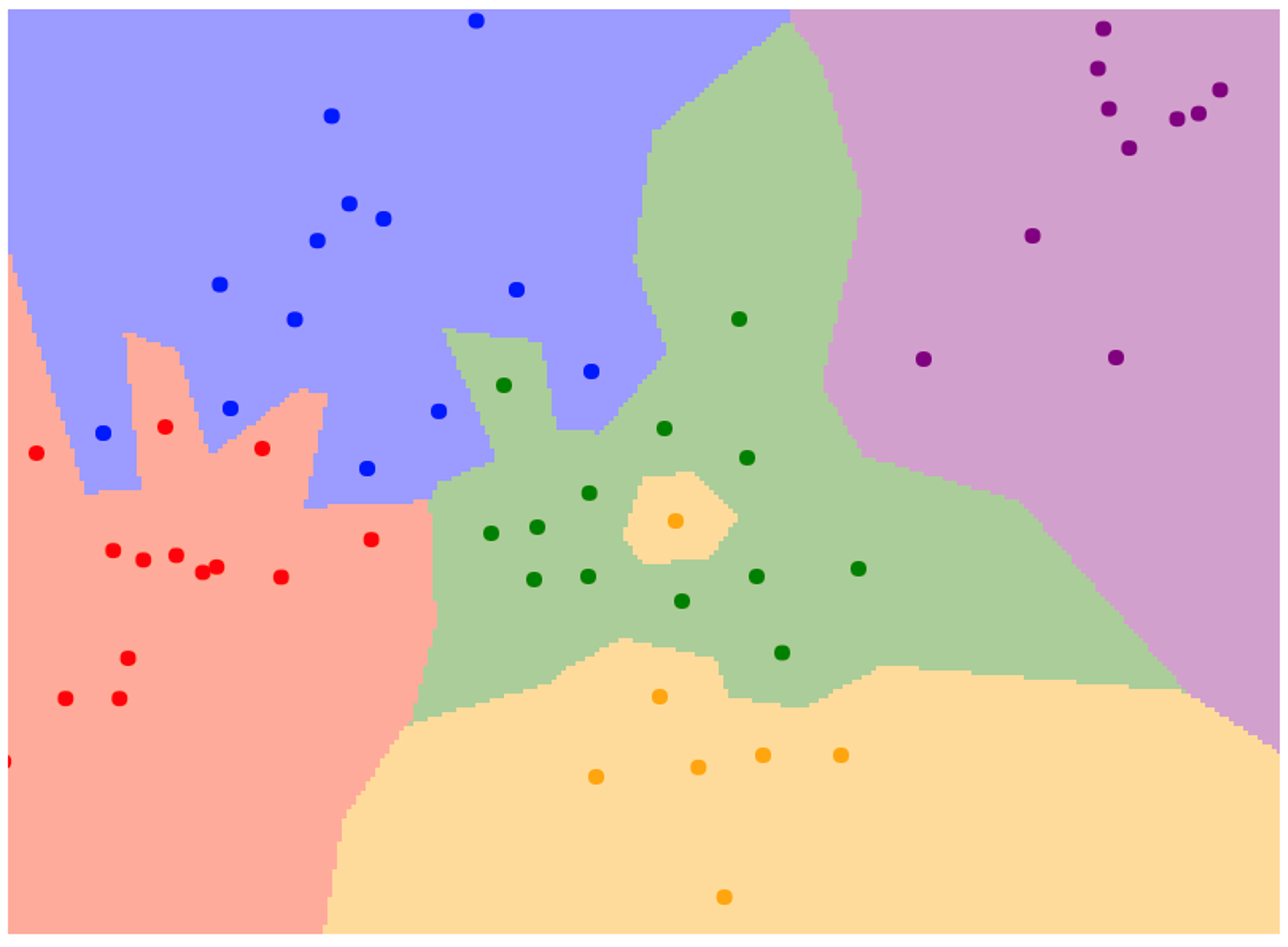
最近邻法适合低维的分类.例如给定二维平面的点,其颜色与坐标呈一定关系;将每一个点预测为最接近的训练集点的颜色,可以预测整个平面的颜色构成:
这个分类算法有如下改进之处:
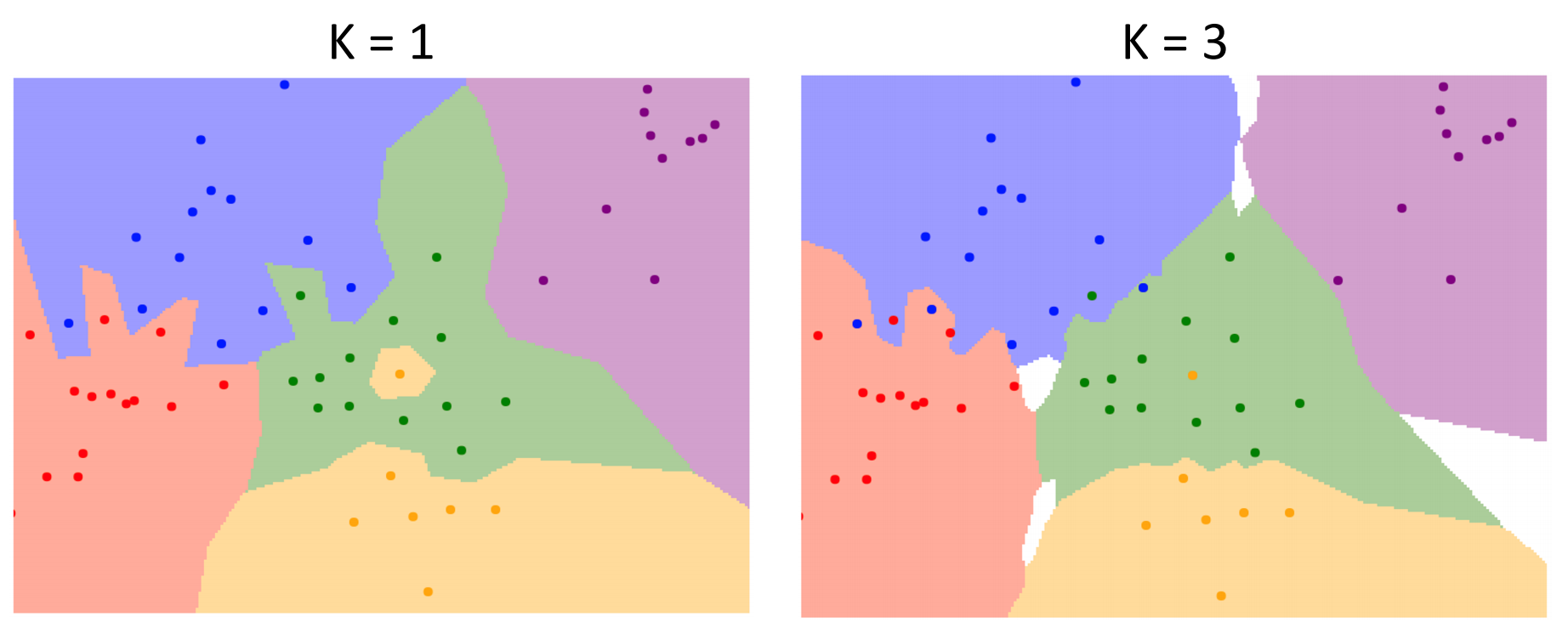
- K-Nearest Neighbors(k-近邻法):不一定只选取最近的一个点,而是选取接近的多个点,与出现最多的颜色相同.如当上图 k=3 时:
- Distance Metric(距离度量):可以使用L1范数或L2**.使用不同距离度量的对比:
可以前往可视化网站体验亲手调参.
2. Hyperparameters
上述K与距离度量属于Hyperparameters(超参数).超参数是事先给定的用来控制学习过程的参数,其不由训练得出.显然不同的超参数会对训练结果产生影响,我们希望找到最好的超参数.
我们可以将所有的数据集分为三类:
- Train(训练集):用于训练数据,让模型更新自身的权重参数.
- Validation(验证集):用于给模型调整超参数.模型不会通过它来更新权重,但开发者需要根据模型在验证集上的准确率或损失值,来决定是否停止训练,或者调整超参数。.
- Test(测试集):用于模型调参与训练完全结束后,客观评估其泛化能力和最终性能.测试集在训练过程必须是不可见的.
为什么不能直接用测试集调参?
如果直接用测试集调节超参数,没有预留其他用于检验结果的数据,会出现模型过拟合的情况:模型是照着答案抄的过程;此时无法反映该模型的真正性能.
最好的调节超参数方法是Cross-Validation(交叉验证):只需要训练集与测试集,将训练集分为若干个互不重叠的子集,称为Fold(折);每次选取其中一折作为验证集而其他折作为训练集,最终将评估结果取平均值.其消除了随机性偏差,缺点是计算开销极大.
3. Linear Classifier
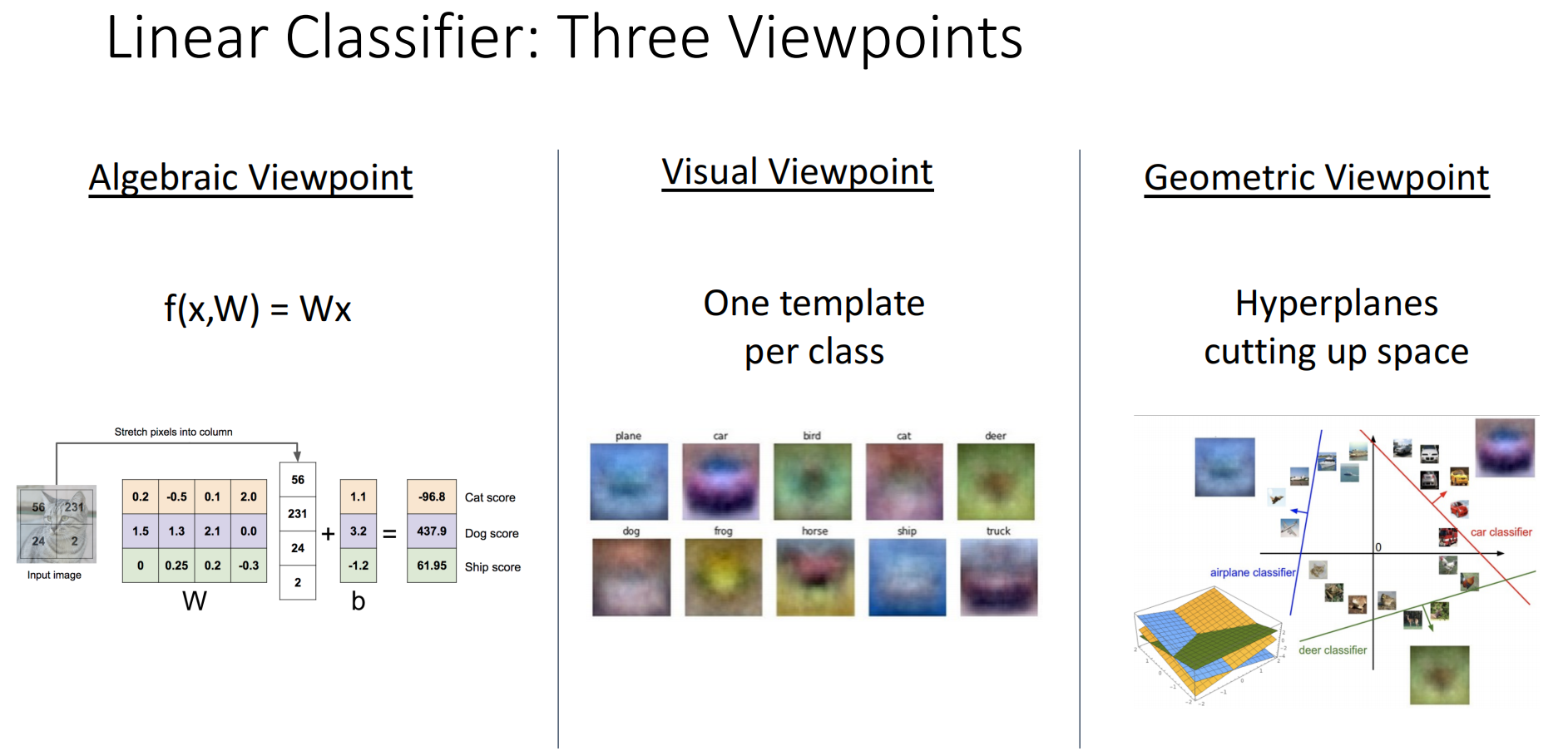
线性分类器属于参数化模型,其通过带有参数(权重 \(W\))的函数 \(f(x,W)=Wx+b\) 为图像计算出各个类别的得分.其中 \(x\) 是输入向量,对于CIFAR10的数据集,其大小为 \(32\times 32\times 3=3072\);\(W\) 是权重矩阵,第0维为10(表示10种类别)、第1维为3072;\(b\) 是一个长度为10的偏置向量.为了方便计算,可以将 \(x\) 最后添加一个分量1,\(W\) 第1维添加一列分量 \(b\),是等效的.
3.1 Perspectives
-
代数视角:将图像拉抻成一个列向量,通过矩阵乘法得出每个类别的得分.
-
视觉视角:由于权重矩阵的每一行乘以图像向量得到一个类的得分,将该行还原成图像的尺寸,可以认为其为识别一个类别的模板.当传入的图像与这个模板相似度高时,得到的内积结果较大,得分较高.我们也可以理解单模板的局限性,其无法捕捉数据的多个形态(模板可能出现有两个头的马).
- 几何视角:将图像看作高维空间中的一个点.线性分类器的每一行相当于在高维空间划分出一个Hyperplane(超平面),将高维空间分为两半.类别的得分在超平面的一侧为正,并且朝着该方向时增加;反方向类似(超平面维度应该为空间维度减1,例如一维空间的超平面是点,二维空间的超平面是直线,三维空间的超平面是平面).
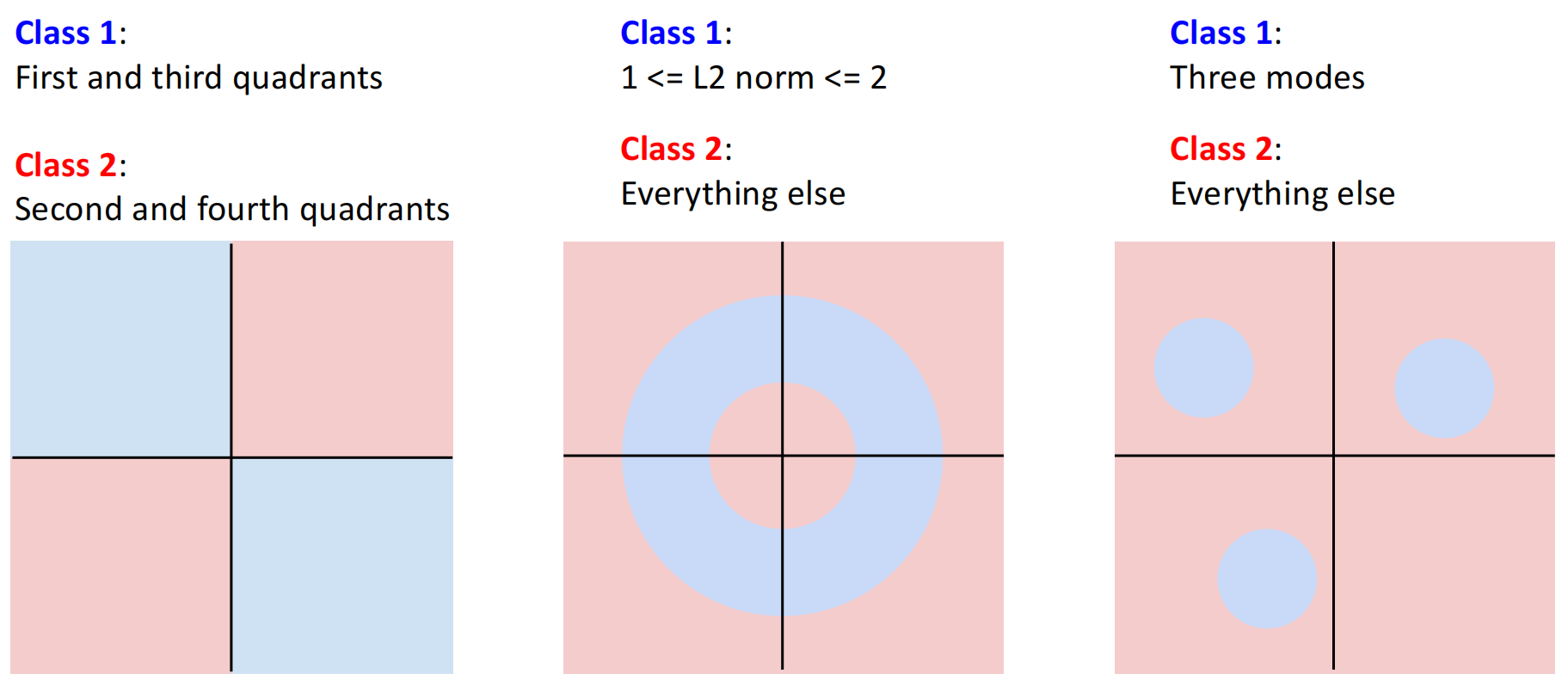
3.2 Limitations
由于超平面对空间的划分是线性一分为二的,其无法划分出非线性的数据.例如如下二维坐标系中的数据,以及经典的异或运算,都无法用线性分类器解决.
4. Loss Function
有了分类函数 \(f(x,W)=Wx+b\) 后,我们还需要一种方法来评价当前权重 \(W\) 的好坏.
Softmax:通过指数化与归一化,将原始分类得分转化为概率分布的一种方法.对于分类结果向量 \(s=f(x,W)\),其定义为
Loss Function(损失函数):单个数据的损失为 \(L_{i}(f(x_{i},W),y_{i})\),数据集的平均损失为 \(\displaystyle\frac{1}{N}\sum_{i=1}^NL_{i}(f(x_{i},W),y_{i})\).
Cross-Entropy(交叉熵损失):损失函数的一种,计算公式为 \(L=-\log(\text{Softmax}(s_i))\),其中 \(i\) 是真实分类的下标(也就是 CE 是只关心正确类的得分).这种定义和最大似然估计有关.如果得分均随机,那么损失因为 \(-\log (1/C)=\log 10 \approx2.3\),可以作为检验的方法.
补充:SVM损失
公式为 \(L_i=\sum_{j\ne y_i}\max(0,s_j-s_{y_i}+1)\)(\(y_i\) 为标签);即对于每一个数据,如果识别出来正确的类别得分比其他分类得分至少大1,则记损失为0;反之记为得分之差加1.因此与交叉熵损失不同,SVM损失可以为零.
相差得分1实际上为margin,其可以为任意值.但实际上margin取任意非零值没有区别,假如margin从1增加到10,只需将权重矩阵整体放大10倍,计算出的得分分差自然增加了10倍,不会影响最后结果.但如果margin为0,其与取非零值有差别.